---
license: apache-2.0
pipeline_tag: reinforcement-learning
tags:
- Deep Reinforcement Learning
- Combinatorial Optimization
- Reinforcement Learning
- Vehicle Routing Problem
---

# 🤠GreedRL
## Overview
- 🤠GreedRL is a fast and general framework for **Combinatorial Optimization Problems (COPs)**, based on **Deep Reinforcement Learning (DRL)**.
- 🤠GreedRL achieves **1200 times faster and 3% improved performance** than [Google OR-Tools](https://developers.google.com/optimization) for large-scale (>=1000 nodes) CVRPs.
## 🏆Award
[INFORMS 2021 Franz Edelman Award finalists](https://www.informs.org/Resource-Center/Video-Library/Edelman-Competition-Videos/2021-Edelman-Competition-Videos/2021-Edelman-Finalist-Alibaba) for Achievement in Operations Research and the Management Sciences (recognized for our work on Cainiao Network VRP algorithm).
## Main features
* **GENERAL**
🤠GreedRL makes **a high level of abstraction for COPs**, which can solve various types of problems, such as TSP, CVRP, VRPTW, PDPTW, SDVRP, DPDP, Order Batching, etc.
* **HIGH-PERFORMANCE**
🤠GreedRL have improved the DRL environment (Env) simulation speed by **CUDA and C++ implementations**.
* **USER-FRIENDLY**
🤠GreedRL framework provides **user-friendly ability for COPs modeling**, where users only need to declare constraints, objectives and variables of COPs. For more examples, please refer to [COPs Modeling examples](https://huggingface.co/Cainiao-AI/GreedRL/blob/main/README.md#cops-modeling-examples).
## Editions
We provide an open source Community Edition and an Enterprise Edition of our 🤠GreedRL for users.
- **The Community Edition** is now released and available to [download](https://huggingface.co/Cainiao-AI/GreedRL).
- **The Enterprise Edition** has a high-performance implementation that achives a faster computing speed, especially when solving larg-scale COPs. For more informations, please contact us.
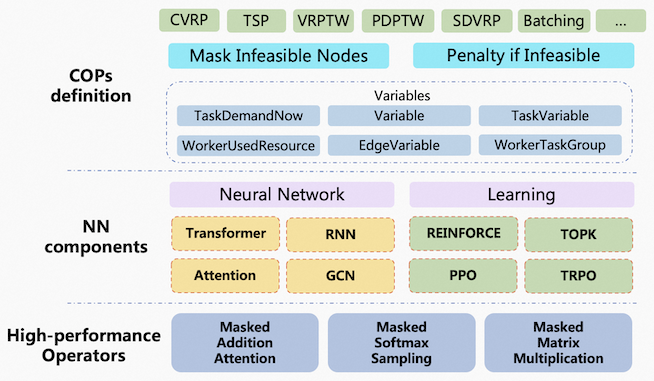
## Architecture
## COPs Modeling examples
### Capacitated Vehicle Routing Problem (CVRP)
CVRP
```python
from greedrl.feature import *
from greedrl.variable import *
from greedrl.function import *
from greedrl import Problem, Solution, Solver
from greedrl import runner
features = [continuous_feature('task_demand'),
continuous_feature('worker_weight_limit'),
continuous_feature('distance_matrix'),
variable_feature('distance_this_to_task'),
variable_feature('distance_task_to_end')]
variables = [task_demand_now('task_demand_now', feature='task_demand'),
task_demand_now('task_demand_this', feature='task_demand', only_this=True),
feature_variable('task_weight'),
worker_variable('worker_weight_limit'),
worker_used_resource('worker_used_weight', task_require='task_weight'),
edge_variable('distance_last_to_this', feature='distance_matrix', last_to_this=True),
edge_variable('distance_this_to_task', feature='distance_matrix', this_to_task=True),
edge_variable('distance_task_to_end', feature='distance_matrix', task_to_end=True)]
class Constraint:
def do_task(self):
return self.task_demand_this
def mask_task(self):
# 已经完成的任务
mask = self.task_demand_now <= 0
# 车辆容量限制
worker_weight_limit = self.worker_weight_limit - self.worker_used_weight
mask |= self.task_demand_now * self.task_weight > worker_weight_limit[:, None]
return mask
def finished(self):
return torch.all(self.task_demand_now <= 0, 1)
class Objective:
def step_worker_end(self):
return self.distance_last_to_this
def step_task(self):
return self.distance_last_to_this
```
### Pickup and Delivery Problem with Time Windows (PDPTW)
PDPTW
```python
from greedrl.model import runner
from greedrl.feature import *
from greedrl.variable import *
from greedrl.function import *
from greedrl import Problem, Solution, Solver
features = [local_category('task_group'),
global_category('task_priority', 2),
variable_feature('distance_this_to_task'),
variable_feature('distance_task_to_end')]
variables = [task_demand_now('task_demand_now', feature='task_demand'),
task_demand_now('task_demand_this', feature='task_demand', only_this=True),
feature_variable('task_weight'),
feature_variable('task_group'),
feature_variable('task_priority'),
feature_variable('task_due_time2', feature='task_due_time'),
task_variable('task_due_time'),
task_variable('task_service_time'),
task_variable('task_due_time_penalty'),
worker_variable('worker_basic_cost'),
worker_variable('worker_distance_cost'),
worker_variable('worker_due_time'),
worker_variable('worker_weight_limit'),
worker_used_resource('worker_used_weight', task_require='task_weight'),
worker_used_resource('worker_used_time', 'distance_matrix', 'task_service_time', 'task_ready_time',
'worker_ready_time'),
edge_variable('distance_last_to_this', feature='distance_matrix', last_to_this=True),
edge_variable('distance_this_to_task', feature='distance_matrix', this_to_task=True),
edge_variable('distance_task_to_end', feature='distance_matrix', task_to_end=True)]
class Constraint:
def do_task(self):
return self.task_demand_this
def mask_worker_end(self):
return task_group_split(self.task_group, self.task_demand_now <= 0)
def mask_task(self):
mask = self.task_demand_now <= 0
mask |= task_group_priority(self.task_group, self.task_priority, mask)
worker_used_time = self.worker_used_time[:, None] + self.distance_this_to_task
mask |= (worker_used_time > self.task_due_time2) & (self.task_priority == 0)
# 容量约束
worker_weight_limit = self.worker_weight_limit - self.worker_used_weight
mask |= self.task_demand_now * self.task_weight > worker_weight_limit[:, None]
return mask
def finished(self):
return torch.all(self.task_demand_now <= 0, 1)
class Objective:
def step_worker_start(self):
return self.worker_basic_cost
def step_worker_end(self):
feasible = self.worker_used_time <= self.worker_due_time
return self.distance_last_to_this * self.worker_distance_cost, feasible
def step_task(self):
worker_used_time = self.worker_used_time - self.task_service_time
feasible = worker_used_time <= self.task_due_time
feasible &= worker_used_time <= self.worker_due_time
cost = self.distance_last_to_this * self.worker_distance_cost
return torch.where(feasible, cost, cost + self.task_due_time_penalty), feasible
```
### VRP with Time Windows (VRPTW)
VRPTW
```python
from greedrl import Problem, Solution, Solver
from greedrl.feature import *
from greedrl.variable import *
from greedrl.function import *
from greedrl.model import runner
from greedrl.myenv import VrptwEnv
features = [continuous_feature('worker_weight_limit'),
continuous_feature('worker_ready_time'),
continuous_feature('worker_due_time'),
continuous_feature('worker_basic_cost'),
continuous_feature('worker_distance_cost'),
continuous_feature('task_demand'),
continuous_feature('task_weight'),
continuous_feature('task_ready_time'),
continuous_feature('task_due_time'),
continuous_feature('task_service_time'),
continuous_feature('distance_matrix')]
variables = [task_demand_now('task_demand_now', feature='task_demand'),
task_demand_now('task_demand_this', feature='task_demand', only_this=True),
feature_variable('task_weight'),
feature_variable('task_due_time'),
feature_variable('task_ready_time'),
feature_variable('task_service_time'),
worker_variable('worker_weight_limit'),
worker_variable('worker_due_time'),
worker_variable('worker_basic_cost'),
worker_variable('worker_distance_cost'),
worker_used_resource('worker_used_weight', task_require='task_weight'),
worker_used_resource('worker_used_time', 'distance_matrix', 'task_service_time', 'task_ready_time',
'worker_ready_time'),
edge_variable('distance_last_to_this', feature='distance_matrix', last_to_this=True),
edge_variable('distance_this_to_task', feature='distance_matrix', this_to_task=True),
edge_variable('distance_task_to_end', feature='distance_matrix', task_to_end=True)]
class Constraint:
def do_task(self):
return self.task_demand_this
def mask_task(self):
# 已经完成的任务
mask = self.task_demand_now <= 0
# 车辆容量限制
worker_weight_limit = self.worker_weight_limit - self.worker_used_weight
mask |= self.task_demand_now * self.task_weight > worker_weight_limit[:, None]
worker_used_time = self.worker_used_time[:, None] + self.distance_this_to_task
mask |= worker_used_time > self.task_due_time
worker_used_time = torch.max(worker_used_time, self.task_ready_time)
worker_used_time += self.task_service_time
worker_used_time += self.distance_task_to_end
mask |= worker_used_time > self.worker_due_time[:, None]
return mask
def finished(self):
return torch.all(self.task_demand_now <= 0, 1)
class Objective:
def step_worker_start(self):
return self.worker_basic_cost
def step_worker_end(self):
return self.distance_last_to_this * self.worker_distance_cost
def step_task(self):
return self.distance_last_to_this * self.worker_distance_cost
```
### Travelling Salesman Problem (TSP)
TSP
```python
from greedrl.feature import *
from greedrl.variable import *
from greedrl import Problem
from greedrl import runner
features = [continuous_feature('task_location'),
variable_feature('distance_this_to_task'),
variable_feature('distance_task_to_end')]
variables = [task_demand_now('task_demand_now', feature='task_demand'),
task_demand_now('task_demand_this', feature='task_demand', only_this=True),
edge_variable('distance_last_to_this', feature='distance_matrix', last_to_this=True),
edge_variable('distance_this_to_task', feature='distance_matrix', this_to_task=True),
edge_variable('distance_task_to_end', feature='distance_matrix', task_to_end=True),
edge_variable('distance_last_to_loop', feature='distance_matrix', last_to_loop=True)]
class Constraint:
def do_task(self):
return self.task_demand_this
def mask_task(self):
mask = self.task_demand_now <= 0
return mask
def mask_worker_end(self):
return torch.any(self.task_demand_now > 0, 1)
def finished(self):
return torch.all(self.task_demand_now <= 0, 1)
class Objective:
def step_worker_end(self):
return self.distance_last_to_loop
def step_task(self):
return self.distance_last_to_this
```
### Split Delivery Vehicle Routing Problem (SDVRP)
SDVRP
```python
from greedrl.feature import *
from greedrl.variable import *
from greedrl import Problem
from greedrl import runner
features = [continuous_feature('task_demand'),
continuous_feature('worker_weight_limit'),
continuous_feature('distance_matrix'),
variable_feature('distance_this_to_task'),
variable_feature('distance_task_to_end')]
variables = [task_demand_now('task_demand'),
task_demand_now('task_demand_this', feature='task_demand', only_this=True),
feature_variable('task_weight'),
task_variable('task_weight_this', feature='task_weight'),
worker_variable('worker_weight_limit'),
worker_used_resource('worker_used_weight', task_require='task_weight'),
edge_variable('distance_last_to_this', feature='distance_matrix', last_to_this=True)]
class Constraint:
def do_task(self):
worker_weight_limit = self.worker_weight_limit - self.worker_used_weight
return torch.min(self.task_demand_this, worker_weight_limit // self.task_weight_this)
def mask_task(self):
mask = self.task_demand <= 0
worker_weight_limit = self.worker_weight_limit - self.worker_used_weight
mask |= self.task_weight > worker_weight_limit[:, None]
return mask
def finished(self):
return torch.all(self.task_demand <= 0, 1)
class Objective:
def step_worker_end(self):
return self.distance_last_to_this
def step_task(self):
return self.distance_last_to_this
```
### Realistic Business Scenario
real-time Dynamic Pickup and Delivery Problem (DPDP)
```python
from greedrl.feature import *
from greedrl.variable import *
from greedrl.function import *
from greedrl import Problem
from greedrl import runner
features = [local_category('task_order'),
global_category('task_type', 2),
global_category('task_new_order', 2),
variable_feature('time_this_to_task'),
continuous_feature('x_time_matrix'),
continuous_feature('task_due_time_x'),
continuous_feature('worker_task_mask')]
variables = [task_demand_now('task_demand_now', feature='task_demand'),
task_demand_now('task_demand_this', feature='task_demand', only_this=True),
task_variable('task_pickup_this', feature='task_pickup'),
task_variable('task_due_time_this', feature='task_due_time'),
feature_variable('task_order', feature='task_order'),
feature_variable('task_type', feature='task_type'),
feature_variable('task_new_pickup', feature='task_new_pickup'),
feature_variable('worker_task_mask', feature='worker_task_mask'),
worker_count_now('worker_count_now', feature='worker_count'),
worker_variable('worker_min_old_task_this', feature='worker_min_old_task'),
worker_variable('worker_max_new_order_this', feature='worker_max_new_order'),
worker_variable('worker_task_mask_this', feature='worker_task_mask'),
worker_used_resource('worker_used_old_task', task_require='task_old'),
worker_used_resource('worker_used_new_order', task_require='task_new_pickup'),
worker_used_resource('worker_used_time', edge_require='time_matrix'),
edge_variable('time_this_to_task', feature='x_time_matrix', this_to_task=True)]
class Constraint:
def do_task(self):
return self.task_demand_this
def mask_worker_start(self):
mask = self.worker_count_now <= 0
finished = self.task_demand_now <= 0
worker_task_mask = self.worker_task_mask | finished[:, None, :]
mask |= torch.all(worker_task_mask, 2)
return mask
def mask_worker_end(self):
mask = self.worker_used_old_task < self.worker_min_old_task_this
mask |= task_group_split(self.task_order, self.task_demand_now <= 0)
return mask
def mask_task(self):
mask = self.task_demand_now <= 0
mask |= task_group_priority(self.task_order, self.task_type, mask)
worker_max_new_order = self.worker_max_new_order_this - self.worker_used_new_order
mask |= self.task_new_pickup > worker_max_new_order[:, None]
mask |= self.worker_task_mask_this
return mask
def finished(self):
worker_mask = self.worker_count_now <= 0
task_mask = self.task_demand_now <= 0
worker_task_mask = worker_mask[:, :, None] | task_mask[:, None, :]
worker_task_mask |= self.worker_task_mask
batch_size = worker_task_mask.size(0)
worker_task_mask = worker_task_mask.view(batch_size, -1)
return worker_task_mask.all(1)
class Objective:
def step_task(self):
over_time = (self.worker_used_time - self.task_due_time_this).clamp(min=0)
pickup_time = self.worker_used_time * self.task_pickup_this
return self.worker_used_time + over_time + pickup_time
def step_finish(self):
return self.task_demand_now.sum(1) * 1000
```
### Order Batching Problem
Batching
```python
from greedrl import Problem, Solver
from greedrl.feature import *
from greedrl.variable import *
from greedrl import runner
features = [local_feature('task_area'),
local_feature('task_roadway'),
local_feature('task_area_group'),
sparse_local_feature('task_item_id', 'task_item_num'),
sparse_local_feature('task_item_owner_id', 'task_item_num'),
variable_feature('worker_task_item'),
variable_feature('worker_used_roadway'),
variable_feature('worker_used_area')]
variables = [task_demand_now('task_demand_now', feature='task_demand'),
task_demand_now('task_demand_this', feature='task_demand', only_this=True),
feature_variable('task_item_id'),
feature_variable('task_item_num'),
feature_variable('task_item_owner_id'),
feature_variable('task_area'),
feature_variable('task_area_group'),
feature_variable('task_load'),
feature_variable('task_group'),
worker_variable('worker_load_limit'),
worker_variable('worker_area_limit'),
worker_variable('worker_area_group_limit'),
worker_task_item('worker_task_item', item_id='task_item_id', item_num='task_item_num'),
worker_task_item('worker_task_item_owner', item_id='task_item_owner_id', item_num='task_item_num'),
worker_used_resource('worker_used_load', task_require='task_load'),
worker_used_resource('worker_used_area', task_require='task_area'),
worker_used_resource('worker_used_roadway', task_require='task_roadway'),
worker_used_resource('worker_used_area_group', task_require='task_area_group')]
class Constraint:
def do_task(self):
return self.task_demand_this
def mask_worker_end(self):
return self.worker_used_load < self.worker_load_limit
def mask_task(self):
# completed tasks
mask = self.task_demand_now <= 0
# mask |= task_group_priority(self.task_group, self.task_out_stock_time, mask)
NT = self.task_item_id.size(1)
worker_task_item = self.worker_task_item[:, None, :]
worker_task_item = worker_task_item.expand(-1, NT, -1)
task_item_in_worker = worker_task_item.gather(2, self.task_item_id.long())
task_item_in_worker = (task_item_in_worker > 0) & (self.task_item_num > 0)
worker_task_item_owner = self.worker_task_item_owner[:, None, :]
worker_task_item_owner = worker_task_item_owner.expand(-1, NT, -1)
task_item_owner_in_worker = worker_task_item_owner.gather(2, self.task_item_owner_id.long())
task_item_owner_in_worker = (task_item_owner_in_worker > 0) & (self.task_item_num > 0)
#
mask |= torch.any(task_item_in_worker & ~task_item_owner_in_worker, 2)
worker_load_limit = self.worker_load_limit - self.worker_used_load
mask |= (self.task_load > worker_load_limit[:, None])
task_area = self.task_area + self.worker_used_area[:, None, :]
task_area_num = task_area.clamp(0, 1).sum(2, dtype=torch.int32)
mask |= (task_area_num > self.worker_area_limit[:, None])
tak_area_group = self.task_area_group + self.worker_used_area_group[:, None, :]
tak_area_group_num = tak_area_group.clamp(0, 1).sum(2, dtype=torch.int32)
mask |= (tak_area_group_num > self.worker_area_group_limit[:, None])
return mask
def finished(self):
return torch.all(self.task_demand_now <= 0, 1)
class Objective:
def step_worker_end(self):
area_num = self.worker_used_area.clamp(0, 1).sum(1)
roadway_num = self.worker_used_roadway.clamp(0, 1).sum(1)
item_num = self.worker_task_item.clamp(0, 1).sum(1)
penalty = (self.worker_load_limit - self.worker_used_load) * 10
return area_num * 100 + roadway_num * 10 + item_num + penalty
```
#
#
# Getting started
## Description
We are delighted to release 🤠GreedRL Community Edition, as well as example of training and testing scripts for the standard Capacitated VRP (CVRP), you can download it and get started.
## Test environment
🤠GreedRL Community Edition has been tested on Ubuntu 18.04 with GCC compiler v7.5.0 and CUDA version 11.4, and a [Miniconda](https://docs.conda.io/en/latest/miniconda.html#system-requirements) distribution with Python 3.8. We recommend using a similar configuration to avoid any possiblem compilation issue.
## Installation
First, clone the repository.
```aidl
$ git clone https://huggingface.co/Cainiao-AI/GreedRL
```
Then, create and activate a python environment using conda, and install required packages.
```aidl
$ conda create -n python38 python==3.8
$ source activate python38
$ pip install -r requirements.txt --extra-index-url https://download.pytorch.org/whl/cu113
```
Finally, compile and add the resulting library `greedrl` to the `PYTHONPATH`
```aidl
$ python setup.py build
$ export PYTHONPATH={your_current_path}/build/lib.linux-x86_64-cpython-38/:$PYTHONPATH
```
## CVRP Training
1. Training data
We use generated data for the training phase, the customers and depot locations are randomly generated in the unit square [0,1] X [0,1]. For CVRP, we assume that the demand of each node is a discrete number in {1,...,9}, chosen uniformly at random, and each vehicle has a default capacity of 50.
2. Start training
```python
$ cd examples/cvrp
$ python train.py --model_filename cvrp_100.pt --problem_size 100
```
## CVRP Testing
After training process, you'll get a trained model, like `cvrp_100.pt`, that you can use for test.
```python
$ cd examples/cvrp
$ python solve.py --device cpu --model_name cvrp_100.pt --problem_size 100
```
# Support
We look forward you to downloading it, using it, and opening discussion if you encounter any problems or have ideas on building an even better experience.
For commercial enquiries, please contact us.
# Citation
```
@article{hu2022alibaba,
title={Alibaba vehicle routing algorithms enable rapid pick and delivery},
author={Hu, Haoyuan and Zhang, Ying and Wei, Jiangwen and Zhan, Yang and Zhang, Xinhui and Huang, Shaojian and Ma, Guangrui and Deng, Yuming and Jiang, Siwei},
journal={INFORMS Journal on Applied Analytics},
volume={52},
number={1},
pages={27--41},
year={2022},
publisher={INFORMS}
}
```