Spaces:
Running

Running
Vincentqyw
commited on
Commit
·
42dde81
1
Parent(s):
e15a186
add: keypoints
Browse files- README.md +10 -3
- app.py +26 -15
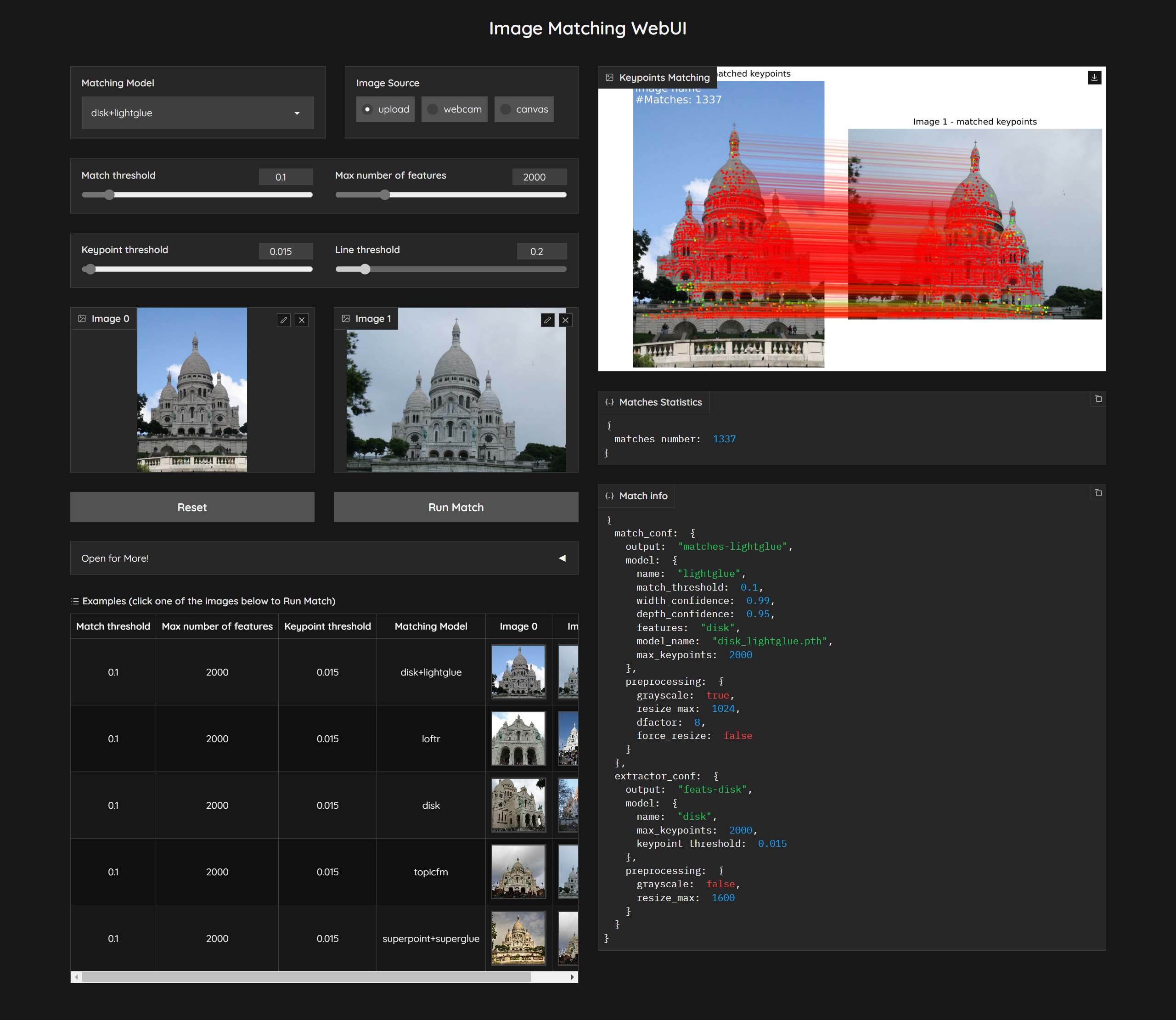
- assets/gui.jpg +0 -0
- common/utils.py +63 -19
- hloc/match_dense.py +2 -2
- hloc/match_features.py +10 -6
README.md
CHANGED
|
@@ -30,7 +30,7 @@ Here is a demo of the tool:
|
|
| 30 |
|
| 31 |
The tool currently supports various popular image matching algorithms, namely:
|
| 32 |
- [x] [LightGlue](https://github.com/cvg/LightGlue), ICCV 2023
|
| 33 |
-
- [x] [DeDoDe](https://github.com/Parskatt/DeDoDe),
|
| 34 |
- [x] [DarkFeat](https://github.com/THU-LYJ-Lab/DarkFeat), AAAI 2023
|
| 35 |
- [ ] [ASTR](https://github.com/ASTR2023/ASTR), CVPR 2023
|
| 36 |
- [ ] [SEM](https://github.com/SEM2023/SEM), CVPR 2023
|
|
@@ -61,7 +61,13 @@ The tool currently supports various popular image matching algorithms, namely:
|
|
| 61 |
|
| 62 |
## How to use
|
| 63 |
|
| 64 |
-
###
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 65 |
``` bash
|
| 66 |
git clone --recursive https://github.com/Vincentqyw/image-matching-webui.git
|
| 67 |
cd image-matching-webui
|
|
@@ -88,7 +94,8 @@ External contributions are very much welcome. Please follow the [PEP8 style guid
|
|
| 88 |
- [x] add webcam support
|
| 89 |
- [x] add [line feature matching](https://github.com/Vincentqyw/LineSegmentsDetection) algorithms
|
| 90 |
- [x] example to add a new feature extractor / matcher
|
| 91 |
-
- [
|
|
|
|
| 92 |
- [ ] support export matches to colmap ([#issue 6](https://github.com/Vincentqyw/image-matching-webui/issues/6))
|
| 93 |
- [ ] add config file to set default parameters
|
| 94 |
- [ ] dynamically load models and reduce GPU overload
|
|
|
|
| 30 |
|
| 31 |
The tool currently supports various popular image matching algorithms, namely:
|
| 32 |
- [x] [LightGlue](https://github.com/cvg/LightGlue), ICCV 2023
|
| 33 |
+
- [x] [DeDoDe](https://github.com/Parskatt/DeDoDe), ArXiv 2023
|
| 34 |
- [x] [DarkFeat](https://github.com/THU-LYJ-Lab/DarkFeat), AAAI 2023
|
| 35 |
- [ ] [ASTR](https://github.com/ASTR2023/ASTR), CVPR 2023
|
| 36 |
- [ ] [SEM](https://github.com/SEM2023/SEM), CVPR 2023
|
|
|
|
| 61 |
|
| 62 |
## How to use
|
| 63 |
|
| 64 |
+
### HuggingFace
|
| 65 |
+
|
| 66 |
+
Just try it on HF <a href='https://huggingface.co/spaces/Realcat/image-matching-webui'><img src='https://img.shields.io/badge/%F0%9F%A4%97%20Hugging%20Face-Spaces-blue'> [](https://openxlab.org.cn/apps/detail/Realcat/image-matching-webui)
|
| 67 |
+
|
| 68 |
+
or deploy it locally following the instructions below.
|
| 69 |
+
|
| 70 |
+
### Requirements
|
| 71 |
``` bash
|
| 72 |
git clone --recursive https://github.com/Vincentqyw/image-matching-webui.git
|
| 73 |
cd image-matching-webui
|
|
|
|
| 94 |
- [x] add webcam support
|
| 95 |
- [x] add [line feature matching](https://github.com/Vincentqyw/LineSegmentsDetection) algorithms
|
| 96 |
- [x] example to add a new feature extractor / matcher
|
| 97 |
+
- [x] ransac to filter outliers
|
| 98 |
+
- [ ] add [rotation images](https://github.com/pidahbus/deep-image-orientation-angle-detection) options before matching
|
| 99 |
- [ ] support export matches to colmap ([#issue 6](https://github.com/Vincentqyw/image-matching-webui/issues/6))
|
| 100 |
- [ ] add config file to set default parameters
|
| 101 |
- [ ] dynamically load models and reduce GPU overload
|
app.py
CHANGED
|
@@ -28,7 +28,7 @@ def ui_reset_state(
|
|
| 28 |
extract_max_keypoints,
|
| 29 |
keypoint_threshold,
|
| 30 |
key,
|
| 31 |
-
enable_ransac=False,
|
| 32 |
ransac_method="RANSAC",
|
| 33 |
ransac_reproj_threshold=8,
|
| 34 |
ransac_confidence=0.999,
|
|
@@ -41,7 +41,7 @@ def ui_reset_state(
|
|
| 41 |
key = list(matcher_zoo.keys())[0]
|
| 42 |
image0 = None
|
| 43 |
image1 = None
|
| 44 |
-
enable_ransac = False
|
| 45 |
return (
|
| 46 |
image0,
|
| 47 |
image1,
|
|
@@ -52,12 +52,14 @@ def ui_reset_state(
|
|
| 52 |
ui_change_imagebox("upload"),
|
| 53 |
ui_change_imagebox("upload"),
|
| 54 |
"upload",
|
| 55 |
-
None,
|
|
|
|
|
|
|
| 56 |
{},
|
| 57 |
{},
|
| 58 |
None,
|
| 59 |
{},
|
| 60 |
-
False,
|
| 61 |
"RANSAC",
|
| 62 |
8,
|
| 63 |
0.999,
|
|
@@ -145,7 +147,7 @@ def run(config):
|
|
| 145 |
# )
|
| 146 |
with gr.Accordion("RANSAC Setting", open=True):
|
| 147 |
with gr.Row(equal_height=False):
|
| 148 |
-
enable_ransac = gr.Checkbox(label="Enable RANSAC")
|
| 149 |
ransac_method = gr.Dropdown(
|
| 150 |
choices=ransac_zoo.keys(),
|
| 151 |
value="RANSAC",
|
|
@@ -192,7 +194,7 @@ def run(config):
|
|
| 192 |
match_setting_max_features,
|
| 193 |
detect_keypoints_threshold,
|
| 194 |
matcher_list,
|
| 195 |
-
enable_ransac,
|
| 196 |
ransac_method,
|
| 197 |
ransac_reproj_threshold,
|
| 198 |
ransac_confidence,
|
|
@@ -223,18 +225,23 @@ def run(config):
|
|
| 223 |
)
|
| 224 |
|
| 225 |
with gr.Column():
|
| 226 |
-
|
| 227 |
-
|
|
|
|
|
|
|
| 228 |
)
|
| 229 |
with gr.Accordion(
|
| 230 |
-
"Open for More: Matches Statistics", open=
|
| 231 |
):
|
| 232 |
matches_result_info = gr.JSON(label="Matches Statistics")
|
| 233 |
matcher_info = gr.JSON(label="Match info")
|
| 234 |
|
| 235 |
-
with gr.Accordion("Open for More:
|
| 236 |
-
output_wrapped = gr.Image(
|
| 237 |
-
|
|
|
|
|
|
|
|
|
|
| 238 |
|
| 239 |
# callbacks
|
| 240 |
match_image_src.change(
|
|
@@ -250,7 +257,9 @@ def run(config):
|
|
| 250 |
|
| 251 |
# collect outputs
|
| 252 |
outputs = [
|
| 253 |
-
|
|
|
|
|
|
|
| 254 |
matches_result_info,
|
| 255 |
matcher_info,
|
| 256 |
geometry_result,
|
|
@@ -270,12 +279,14 @@ def run(config):
|
|
| 270 |
input_image0,
|
| 271 |
input_image1,
|
| 272 |
match_image_src,
|
| 273 |
-
|
|
|
|
|
|
|
| 274 |
matches_result_info,
|
| 275 |
matcher_info,
|
| 276 |
output_wrapped,
|
| 277 |
geometry_result,
|
| 278 |
-
enable_ransac,
|
| 279 |
ransac_method,
|
| 280 |
ransac_reproj_threshold,
|
| 281 |
ransac_confidence,
|
|
|
|
| 28 |
extract_max_keypoints,
|
| 29 |
keypoint_threshold,
|
| 30 |
key,
|
| 31 |
+
# enable_ransac=False,
|
| 32 |
ransac_method="RANSAC",
|
| 33 |
ransac_reproj_threshold=8,
|
| 34 |
ransac_confidence=0.999,
|
|
|
|
| 41 |
key = list(matcher_zoo.keys())[0]
|
| 42 |
image0 = None
|
| 43 |
image1 = None
|
| 44 |
+
# enable_ransac = False
|
| 45 |
return (
|
| 46 |
image0,
|
| 47 |
image1,
|
|
|
|
| 52 |
ui_change_imagebox("upload"),
|
| 53 |
ui_change_imagebox("upload"),
|
| 54 |
"upload",
|
| 55 |
+
None, # keypoints
|
| 56 |
+
None, # raw matches
|
| 57 |
+
None, # ransac matches
|
| 58 |
{},
|
| 59 |
{},
|
| 60 |
None,
|
| 61 |
{},
|
| 62 |
+
# False,
|
| 63 |
"RANSAC",
|
| 64 |
8,
|
| 65 |
0.999,
|
|
|
|
| 147 |
# )
|
| 148 |
with gr.Accordion("RANSAC Setting", open=True):
|
| 149 |
with gr.Row(equal_height=False):
|
| 150 |
+
# enable_ransac = gr.Checkbox(label="Enable RANSAC")
|
| 151 |
ransac_method = gr.Dropdown(
|
| 152 |
choices=ransac_zoo.keys(),
|
| 153 |
value="RANSAC",
|
|
|
|
| 194 |
match_setting_max_features,
|
| 195 |
detect_keypoints_threshold,
|
| 196 |
matcher_list,
|
| 197 |
+
# enable_ransac,
|
| 198 |
ransac_method,
|
| 199 |
ransac_reproj_threshold,
|
| 200 |
ransac_confidence,
|
|
|
|
| 225 |
)
|
| 226 |
|
| 227 |
with gr.Column():
|
| 228 |
+
output_keypoints = gr.Image(label="Keypoints", type="numpy")
|
| 229 |
+
output_matches_raw = gr.Image(label="Raw Matches", type="numpy")
|
| 230 |
+
output_matches_ransac = gr.Image(
|
| 231 |
+
label="Ransac Matches", type="numpy"
|
| 232 |
)
|
| 233 |
with gr.Accordion(
|
| 234 |
+
"Open for More: Matches Statistics", open=False
|
| 235 |
):
|
| 236 |
matches_result_info = gr.JSON(label="Matches Statistics")
|
| 237 |
matcher_info = gr.JSON(label="Match info")
|
| 238 |
|
| 239 |
+
with gr.Accordion("Open for More: Warped Image", open=False):
|
| 240 |
+
output_wrapped = gr.Image(
|
| 241 |
+
label="Wrapped Pair", type="numpy"
|
| 242 |
+
)
|
| 243 |
+
with gr.Accordion("Open for More: Geometry info", open=False):
|
| 244 |
+
geometry_result = gr.JSON(label="Reconstructed Geometry")
|
| 245 |
|
| 246 |
# callbacks
|
| 247 |
match_image_src.change(
|
|
|
|
| 257 |
|
| 258 |
# collect outputs
|
| 259 |
outputs = [
|
| 260 |
+
output_keypoints,
|
| 261 |
+
output_matches_raw,
|
| 262 |
+
output_matches_ransac,
|
| 263 |
matches_result_info,
|
| 264 |
matcher_info,
|
| 265 |
geometry_result,
|
|
|
|
| 279 |
input_image0,
|
| 280 |
input_image1,
|
| 281 |
match_image_src,
|
| 282 |
+
output_keypoints,
|
| 283 |
+
output_matches_raw,
|
| 284 |
+
output_matches_ransac,
|
| 285 |
matches_result_info,
|
| 286 |
matcher_info,
|
| 287 |
output_wrapped,
|
| 288 |
geometry_result,
|
| 289 |
+
# enable_ransac,
|
| 290 |
ransac_method,
|
| 291 |
ransac_reproj_threshold,
|
| 292 |
ransac_confidence,
|
assets/gui.jpg
CHANGED
|

|
Git LFS Details
|
common/utils.py
CHANGED
|
@@ -8,6 +8,7 @@ import gradio as gr
|
|
| 8 |
from hloc import matchers, extractors
|
| 9 |
from hloc.utils.base_model import dynamic_load
|
| 10 |
from hloc import match_dense, match_features, extract_features
|
|
|
|
| 11 |
from .viz import draw_matches, fig2im, plot_images, plot_color_line_matches
|
| 12 |
|
| 13 |
device = "cuda" if torch.cuda.is_available() else "cpu"
|
|
@@ -68,7 +69,7 @@ def gen_examples():
|
|
| 68 |
match_setting_max_features,
|
| 69 |
detect_keypoints_threshold,
|
| 70 |
mt,
|
| 71 |
-
enable_ransac,
|
| 72 |
ransac_method,
|
| 73 |
ransac_reproj_threshold,
|
| 74 |
ransac_confidence,
|
|
@@ -105,6 +106,9 @@ def filter_matches(
|
|
| 105 |
return pred
|
| 106 |
if ransac_method not in ransac_zoo.keys():
|
| 107 |
ransac_method = "RANSAC"
|
|
|
|
|
|
|
|
|
|
| 108 |
H, mask = cv2.findHomography(
|
| 109 |
mkpts0,
|
| 110 |
mkpts1,
|
|
@@ -236,7 +240,7 @@ def change_estimate_geom(input_image0, input_image1, matches_info, choice):
|
|
| 236 |
return None, None
|
| 237 |
|
| 238 |
|
| 239 |
-
def display_matches(pred: dict):
|
| 240 |
img0 = pred["image0_orig"]
|
| 241 |
img1 = pred["image1_orig"]
|
| 242 |
|
|
@@ -255,11 +259,8 @@ def display_matches(pred: dict):
|
|
| 255 |
img0,
|
| 256 |
img1,
|
| 257 |
mconf,
|
| 258 |
-
dpi=
|
| 259 |
-
titles=
|
| 260 |
-
"Image 0 - matched keypoints",
|
| 261 |
-
"Image 1 - matched keypoints",
|
| 262 |
-
],
|
| 263 |
)
|
| 264 |
fig = fig_mkpts
|
| 265 |
if "line0_orig" in pred.keys() and "line1_orig" in pred.keys():
|
|
@@ -302,7 +303,7 @@ def run_matching(
|
|
| 302 |
extract_max_keypoints,
|
| 303 |
keypoint_threshold,
|
| 304 |
key,
|
| 305 |
-
enable_ransac=False,
|
| 306 |
ransac_method="RANSAC",
|
| 307 |
ransac_reproj_threshold=8,
|
| 308 |
ransac_confidence=0.999,
|
|
@@ -312,6 +313,10 @@ def run_matching(
|
|
| 312 |
# image0 and image1 is RGB mode
|
| 313 |
if image0 is None or image1 is None:
|
| 314 |
raise gr.Error("Error: No images found! Please upload two images.")
|
|
|
|
|
|
|
|
|
|
|
|
|
| 315 |
|
| 316 |
model = matcher_zoo[key]
|
| 317 |
match_conf = model["config"]
|
|
@@ -341,16 +346,48 @@ def run_matching(
|
|
| 341 |
pred = match_features.match_images(matcher, pred0, pred1)
|
| 342 |
del extractor
|
| 343 |
|
| 344 |
-
|
| 345 |
-
|
| 346 |
-
|
| 347 |
-
|
| 348 |
-
|
| 349 |
-
|
| 350 |
-
|
| 351 |
-
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 352 |
|
| 353 |
-
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 354 |
geom_info = compute_geom(pred)
|
| 355 |
output_wrapped, _ = change_estimate_geom(
|
| 356 |
pred["image0_orig"],
|
|
@@ -358,10 +395,17 @@ def run_matching(
|
|
| 358 |
{"geom_info": geom_info},
|
| 359 |
choice_estimate_geom,
|
| 360 |
)
|
|
|
|
| 361 |
del pred
|
|
|
|
| 362 |
return (
|
| 363 |
-
|
| 364 |
-
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 365 |
{
|
| 366 |
"match_conf": match_conf,
|
| 367 |
"extractor_conf": extract_conf,
|
|
|
|
| 8 |
from hloc import matchers, extractors
|
| 9 |
from hloc.utils.base_model import dynamic_load
|
| 10 |
from hloc import match_dense, match_features, extract_features
|
| 11 |
+
from hloc.utils.viz import add_text, plot_keypoints
|
| 12 |
from .viz import draw_matches, fig2im, plot_images, plot_color_line_matches
|
| 13 |
|
| 14 |
device = "cuda" if torch.cuda.is_available() else "cpu"
|
|
|
|
| 69 |
match_setting_max_features,
|
| 70 |
detect_keypoints_threshold,
|
| 71 |
mt,
|
| 72 |
+
# enable_ransac,
|
| 73 |
ransac_method,
|
| 74 |
ransac_reproj_threshold,
|
| 75 |
ransac_confidence,
|
|
|
|
| 106 |
return pred
|
| 107 |
if ransac_method not in ransac_zoo.keys():
|
| 108 |
ransac_method = "RANSAC"
|
| 109 |
+
|
| 110 |
+
if len(mkpts0) < 4:
|
| 111 |
+
return pred
|
| 112 |
H, mask = cv2.findHomography(
|
| 113 |
mkpts0,
|
| 114 |
mkpts1,
|
|
|
|
| 240 |
return None, None
|
| 241 |
|
| 242 |
|
| 243 |
+
def display_matches(pred: dict, titles=[], dpi=300):
|
| 244 |
img0 = pred["image0_orig"]
|
| 245 |
img1 = pred["image1_orig"]
|
| 246 |
|
|
|
|
| 259 |
img0,
|
| 260 |
img1,
|
| 261 |
mconf,
|
| 262 |
+
dpi=dpi,
|
| 263 |
+
titles=titles,
|
|
|
|
|
|
|
|
|
|
| 264 |
)
|
| 265 |
fig = fig_mkpts
|
| 266 |
if "line0_orig" in pred.keys() and "line1_orig" in pred.keys():
|
|
|
|
| 303 |
extract_max_keypoints,
|
| 304 |
keypoint_threshold,
|
| 305 |
key,
|
| 306 |
+
# enable_ransac=False,
|
| 307 |
ransac_method="RANSAC",
|
| 308 |
ransac_reproj_threshold=8,
|
| 309 |
ransac_confidence=0.999,
|
|
|
|
| 313 |
# image0 and image1 is RGB mode
|
| 314 |
if image0 is None or image1 is None:
|
| 315 |
raise gr.Error("Error: No images found! Please upload two images.")
|
| 316 |
+
# init output
|
| 317 |
+
output_keypoints = None
|
| 318 |
+
output_matches_raw = None
|
| 319 |
+
output_matches_ransac = None
|
| 320 |
|
| 321 |
model = matcher_zoo[key]
|
| 322 |
match_conf = model["config"]
|
|
|
|
| 346 |
pred = match_features.match_images(matcher, pred0, pred1)
|
| 347 |
del extractor
|
| 348 |
|
| 349 |
+
# plot images with keypoints
|
| 350 |
+
titles = [
|
| 351 |
+
"Image 0 - Keypoints",
|
| 352 |
+
"Image 1 - Keypoints",
|
| 353 |
+
]
|
| 354 |
+
output_keypoints = plot_images([image0, image1], titles=titles, dpi=300)
|
| 355 |
+
plot_keypoints([pred["keypoints0"], pred["keypoints1"]])
|
| 356 |
+
text = (
|
| 357 |
+
f"# keypoints0: {len(pred['keypoints0'])} \n"
|
| 358 |
+
+ f"# keypoints1: {len(pred['keypoints1'])}"
|
| 359 |
+
)
|
| 360 |
+
|
| 361 |
+
add_text(0, text, fs=15)
|
| 362 |
+
output_keypoints = fig2im(output_keypoints)
|
| 363 |
+
|
| 364 |
+
# plot images with raw matches
|
| 365 |
+
titles = [
|
| 366 |
+
"Image 0 - Raw matched keypoints",
|
| 367 |
+
"Image 1 - Raw matched keypoints",
|
| 368 |
+
]
|
| 369 |
+
|
| 370 |
+
output_matches_raw, num_matches_raw = display_matches(pred, titles=titles)
|
| 371 |
|
| 372 |
+
# if enable_ransac:
|
| 373 |
+
filter_matches(
|
| 374 |
+
pred,
|
| 375 |
+
ransac_method=ransac_method,
|
| 376 |
+
ransac_reproj_threshold=ransac_reproj_threshold,
|
| 377 |
+
ransac_confidence=ransac_confidence,
|
| 378 |
+
ransac_max_iter=ransac_max_iter,
|
| 379 |
+
)
|
| 380 |
+
|
| 381 |
+
# plot images with ransac matches
|
| 382 |
+
titles = [
|
| 383 |
+
"Image 0 - Ransac matched keypoints",
|
| 384 |
+
"Image 1 - Ransac matched keypoints",
|
| 385 |
+
]
|
| 386 |
+
output_matches_ransac, num_matches_ransac = display_matches(
|
| 387 |
+
pred, titles=titles
|
| 388 |
+
)
|
| 389 |
+
|
| 390 |
+
# plot wrapped images
|
| 391 |
geom_info = compute_geom(pred)
|
| 392 |
output_wrapped, _ = change_estimate_geom(
|
| 393 |
pred["image0_orig"],
|
|
|
|
| 395 |
{"geom_info": geom_info},
|
| 396 |
choice_estimate_geom,
|
| 397 |
)
|
| 398 |
+
|
| 399 |
del pred
|
| 400 |
+
|
| 401 |
return (
|
| 402 |
+
output_keypoints,
|
| 403 |
+
output_matches_raw,
|
| 404 |
+
output_matches_ransac,
|
| 405 |
+
{
|
| 406 |
+
"number raw matches": num_matches_raw,
|
| 407 |
+
"number ransac matches": num_matches_ransac,
|
| 408 |
+
},
|
| 409 |
{
|
| 410 |
"match_conf": match_conf,
|
| 411 |
"extractor_conf": extract_conf,
|
hloc/match_dense.py
CHANGED
|
@@ -340,8 +340,8 @@ def match_images(model, image_0, image_1, conf, device="cpu"):
|
|
| 340 |
"image1": image1.squeeze().cpu().numpy(),
|
| 341 |
"image0_orig": image_0,
|
| 342 |
"image1_orig": image_1,
|
| 343 |
-
"keypoints0":
|
| 344 |
-
"keypoints1":
|
| 345 |
"keypoints0_orig": kpts0_origin.cpu().numpy(),
|
| 346 |
"keypoints1_orig": kpts1_origin.cpu().numpy(),
|
| 347 |
"original_size0": np.array(image_0.shape[:2][::-1]),
|
|
|
|
| 340 |
"image1": image1.squeeze().cpu().numpy(),
|
| 341 |
"image0_orig": image_0,
|
| 342 |
"image1_orig": image_1,
|
| 343 |
+
"keypoints0": kpts0_origin.cpu().numpy(),
|
| 344 |
+
"keypoints1": kpts1_origin.cpu().numpy(),
|
| 345 |
"keypoints0_orig": kpts0_origin.cpu().numpy(),
|
| 346 |
"keypoints1_orig": kpts1_origin.cpu().numpy(),
|
| 347 |
"original_size0": np.array(image_0.shape[:2][::-1]),
|
hloc/match_features.py
CHANGED
|
@@ -369,15 +369,19 @@ def match_images(model, feat0, feat1):
|
|
| 369 |
# rescale the keypoints to their original size
|
| 370 |
s0 = feat0["original_size"] / feat0["size"]
|
| 371 |
s1 = feat1["original_size"] / feat1["size"]
|
| 372 |
-
kpts0_origin = scale_keypoints(torch.from_numpy(
|
| 373 |
-
kpts1_origin = scale_keypoints(torch.from_numpy(
|
|
|
|
|
|
|
|
|
|
|
|
|
| 374 |
ret = {
|
| 375 |
"image0_orig": feat0["image_orig"],
|
| 376 |
"image1_orig": feat1["image_orig"],
|
| 377 |
-
"keypoints0":
|
| 378 |
-
"keypoints1":
|
| 379 |
-
"keypoints0_orig":
|
| 380 |
-
"keypoints1_orig":
|
| 381 |
"mconf": mconfid,
|
| 382 |
}
|
| 383 |
del feat0, feat1, desc0, desc1, kpts0, kpts1, kpts0_origin, kpts1_origin
|
|
|
|
| 369 |
# rescale the keypoints to their original size
|
| 370 |
s0 = feat0["original_size"] / feat0["size"]
|
| 371 |
s1 = feat1["original_size"] / feat1["size"]
|
| 372 |
+
kpts0_origin = scale_keypoints(torch.from_numpy(kpts0 + 0.5), s0) - 0.5
|
| 373 |
+
kpts1_origin = scale_keypoints(torch.from_numpy(kpts1 + 0.5), s1) - 0.5
|
| 374 |
+
|
| 375 |
+
mkpts0_origin = scale_keypoints(torch.from_numpy(mkpts0 + 0.5), s0) - 0.5
|
| 376 |
+
mkpts1_origin = scale_keypoints(torch.from_numpy(mkpts1 + 0.5), s1) - 0.5
|
| 377 |
+
|
| 378 |
ret = {
|
| 379 |
"image0_orig": feat0["image_orig"],
|
| 380 |
"image1_orig": feat1["image_orig"],
|
| 381 |
+
"keypoints0": kpts0_origin.numpy(),
|
| 382 |
+
"keypoints1": kpts1_origin.numpy(),
|
| 383 |
+
"keypoints0_orig": mkpts0_origin.numpy(),
|
| 384 |
+
"keypoints1_orig": mkpts1_origin.numpy(),
|
| 385 |
"mconf": mconfid,
|
| 386 |
}
|
| 387 |
del feat0, feat1, desc0, desc1, kpts0, kpts1, kpts0_origin, kpts1_origin
|