
File size: 3,224 Bytes
30fab18 9b3812d 30fab18 e9e8485 30fab18 e9e8485 30fab18 e9e8485 30fab18 1284de7 |
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 |
---
license: apache-2.0
tags:
- vision
- depth-estimation
widget:
- src: https://huggingface.co/datasets/mishig/sample_images/resolve/main/tiger.jpg
example_title: Tiger
- src: https://huggingface.co/datasets/mishig/sample_images/resolve/main/teapot.jpg
example_title: Teapot
- src: https://huggingface.co/datasets/mishig/sample_images/resolve/main/palace.jpg
example_title: Palace
---
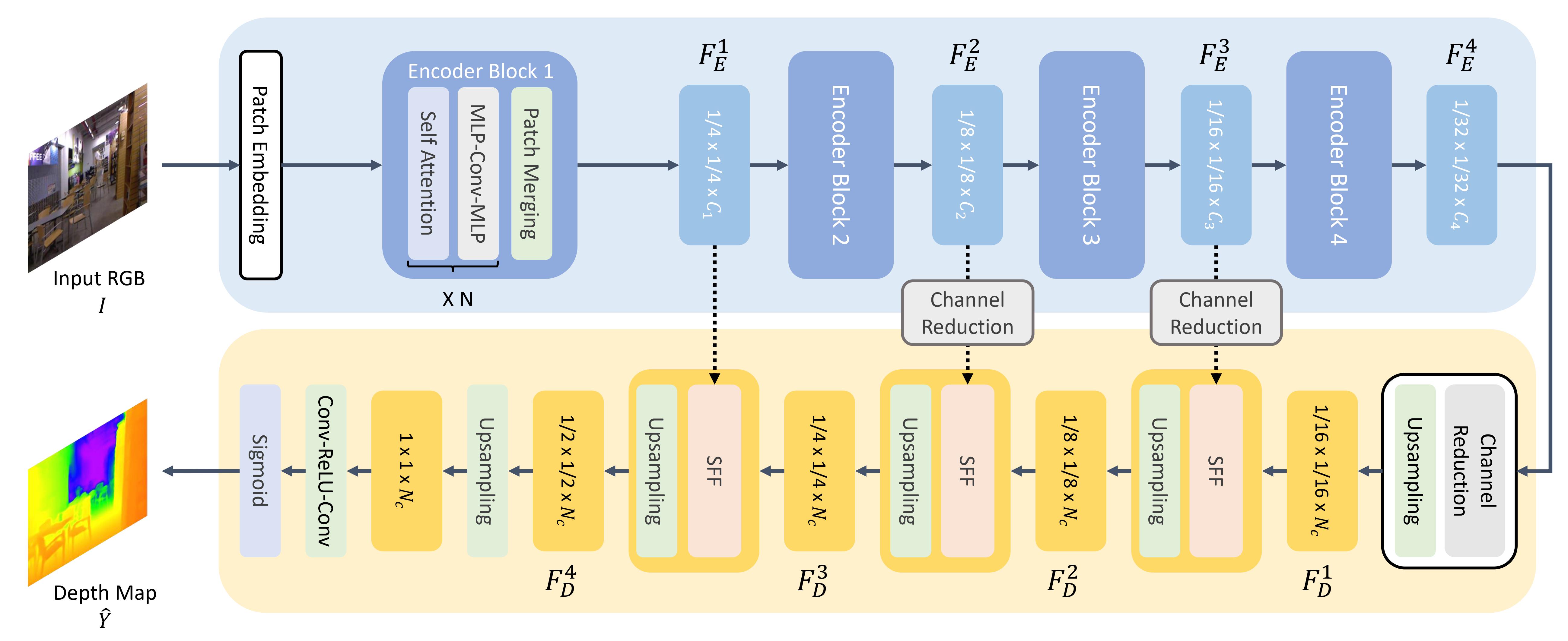
# GLPN fine-tuned on KITTI
Global-Local Path Networks (GLPN) model trained on KITTI for monocular depth estimation. It was introduced in the paper [Global-Local Path Networks for Monocular Depth Estimation with Vertical CutDepth](https://arxiv.org/abs/2201.07436) by Kim et al. and first released in [this repository](https://github.com/vinvino02/GLPDepth).
Disclaimer: The team releasing GLPN did not write a model card for this model so this model card has been written by the Hugging Face team.
## Model description
GLPN uses SegFormer as backbone and adds a lightweight head on top for depth estimation.
## Intended uses & limitations
You can use the raw model for monocular depth estimation. See the [model hub](https://huggingface.co/models?search=glpn) to look for
fine-tuned versions on a task that interests you.
### How to use
Here is how to use this model:
```python
from transformers import GLPNImageProcessor, GLPNForDepthEstimation
import torch
import numpy as np
from PIL import Image
import requests
url = "http://images.cocodataset.org/val2017/000000039769.jpg"
image = Image.open(requests.get(url, stream=True).raw)
processor = GLPNImageProcessor.from_pretrained("vinvino02/glpn-kitti")
model = GLPNForDepthEstimation.from_pretrained("vinvino02/glpn-kitti")
# prepare image for the model
inputs = processor(images=image, return_tensors="pt")
with torch.no_grad():
outputs = model(**inputs)
predicted_depth = outputs.predicted_depth
# interpolate to original size
prediction = torch.nn.functional.interpolate(
predicted_depth.unsqueeze(1),
size=image.size[::-1],
mode="bicubic",
align_corners=False,
)
# visualize the prediction
output = prediction.squeeze().cpu().numpy()
formatted = (output * 255 / np.max(output)).astype("uint8")
depth = Image.fromarray(formatted)
```
For more code examples, we refer to the [documentation](https://huggingface.co/docs/transformers/master/en/model_doc/glpn).
### BibTeX entry and citation info
```bibtex
@article{DBLP:journals/corr/abs-2201-07436,
author = {Doyeon Kim and
Woonghyun Ga and
Pyunghwan Ahn and
Donggyu Joo and
Sehwan Chun and
Junmo Kim},
title = {Global-Local Path Networks for Monocular Depth Estimation with Vertical
CutDepth},
journal = {CoRR},
volume = {abs/2201.07436},
year = {2022},
url = {https://arxiv.org/abs/2201.07436},
eprinttype = {arXiv},
eprint = {2201.07436},
timestamp = {Fri, 21 Jan 2022 13:57:15 +0100},
biburl = {https://dblp.org/rec/journals/corr/abs-2201-07436.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}
``` |