
zach
commited on
Commit
·
3ef1661
1
Parent(s):
474ea9a
initial commit based on github repo
Browse filesThis view is limited to 50 files because it contains too many changes.
See raw diff
- .gitattributes +2 -0
- LICENSE +121 -0
- README.md +319 -3
- data/gene_annos_kitti_demo.py +32 -0
- data/gene_annos_nyu_demo.py +31 -0
- data/kitti_demo/depth/0000000005.png +3 -0
- data/kitti_demo/depth/0000000050.png +3 -0
- data/kitti_demo/depth/0000000100.png +3 -0
- data/kitti_demo/rgb/0000000005.png +3 -0
- data/kitti_demo/rgb/0000000050.png +3 -0
- data/kitti_demo/rgb/0000000100.png +3 -0
- data/kitti_demo/test_annotations.json +1 -0
- data/nyu_demo/depth/sync_depth_00000.png +3 -0
- data/nyu_demo/depth/sync_depth_00050.png +3 -0
- data/nyu_demo/depth/sync_depth_00100.png +3 -0
- data/nyu_demo/rgb/rgb_00000.jpg +0 -0
- data/nyu_demo/rgb/rgb_00050.jpg +0 -0
- data/nyu_demo/rgb/rgb_00100.jpg +0 -0
- data/nyu_demo/test_annotations.json +1 -0
- data/wild_demo/david-kohler-VFRTXGw1VjU-unsplash.jpg +0 -0
- data/wild_demo/jonathan-borba-CnthDZXCdoY-unsplash.jpg +0 -0
- data/wild_demo/randy-fath-G1yhU1Ej-9A-unsplash.jpg +0 -0
- data_info/__init__.py +2 -0
- data_info/pretrained_weight.py +16 -0
- data_info/public_datasets.py +7 -0
- media/gifs/demo_1.gif +3 -0
- media/gifs/demo_12.gif +3 -0
- media/gifs/demo_2.gif +3 -0
- media/gifs/demo_22.gif +3 -0
- media/screenshots/challenge.PNG +0 -0
- media/screenshots/page2.png +3 -0
- media/screenshots/pipeline.png +3 -0
- mono/configs/HourglassDecoder/convlarge.0.3_150.py +25 -0
- mono/configs/HourglassDecoder/test_kitti_convlarge.0.3_150.py +25 -0
- mono/configs/HourglassDecoder/test_nyu_convlarge.0.3_150.py +25 -0
- mono/configs/HourglassDecoder/vit.raft5.large.py +33 -0
- mono/configs/HourglassDecoder/vit.raft5.small.py +33 -0
- mono/configs/__init__.py +1 -0
- mono/configs/_base_/_data_base_.py +13 -0
- mono/configs/_base_/datasets/_data_base_.py +12 -0
- mono/configs/_base_/default_runtime.py +4 -0
- mono/configs/_base_/models/backbones/convnext_large.py +16 -0
- mono/configs/_base_/models/backbones/dino_vit_large.py +7 -0
- mono/configs/_base_/models/backbones/dino_vit_large_reg.py +7 -0
- mono/configs/_base_/models/backbones/dino_vit_small_reg.py +7 -0
- mono/configs/_base_/models/encoder_decoder/convnext_large.hourglassdecoder.py +10 -0
- mono/configs/_base_/models/encoder_decoder/dino_vit_large.dpt_raft.py +20 -0
- mono/configs/_base_/models/encoder_decoder/dino_vit_large_reg.dpt_raft.py +19 -0
- mono/configs/_base_/models/encoder_decoder/dino_vit_small_reg.dpt_raft.py +19 -0
- mono/model/__init__.py +5 -0
.gitattributes
CHANGED
|
@@ -33,3 +33,5 @@ saved_model/**/* filter=lfs diff=lfs merge=lfs -text
|
|
| 33 |
*.zip filter=lfs diff=lfs merge=lfs -text
|
| 34 |
*.zst filter=lfs diff=lfs merge=lfs -text
|
| 35 |
*tfevents* filter=lfs diff=lfs merge=lfs -text
|
|
|
|
|
|
|
|
|
| 33 |
*.zip filter=lfs diff=lfs merge=lfs -text
|
| 34 |
*.zst filter=lfs diff=lfs merge=lfs -text
|
| 35 |
*tfevents* filter=lfs diff=lfs merge=lfs -text
|
| 36 |
+
*.gif filter=lfs diff=lfs merge=lfs -text
|
| 37 |
+
*.png filter=lfs diff=lfs merge=lfs -text
|
LICENSE
ADDED
|
@@ -0,0 +1,121 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
Creative Commons Legal Code
|
| 2 |
+
|
| 3 |
+
CC0 1.0 Universal
|
| 4 |
+
|
| 5 |
+
CREATIVE COMMONS CORPORATION IS NOT A LAW FIRM AND DOES NOT PROVIDE
|
| 6 |
+
LEGAL SERVICES. DISTRIBUTION OF THIS DOCUMENT DOES NOT CREATE AN
|
| 7 |
+
ATTORNEY-CLIENT RELATIONSHIP. CREATIVE COMMONS PROVIDES THIS
|
| 8 |
+
INFORMATION ON AN "AS-IS" BASIS. CREATIVE COMMONS MAKES NO WARRANTIES
|
| 9 |
+
REGARDING THE USE OF THIS DOCUMENT OR THE INFORMATION OR WORKS
|
| 10 |
+
PROVIDED HEREUNDER, AND DISCLAIMS LIABILITY FOR DAMAGES RESULTING FROM
|
| 11 |
+
THE USE OF THIS DOCUMENT OR THE INFORMATION OR WORKS PROVIDED
|
| 12 |
+
HEREUNDER.
|
| 13 |
+
|
| 14 |
+
Statement of Purpose
|
| 15 |
+
|
| 16 |
+
The laws of most jurisdictions throughout the world automatically confer
|
| 17 |
+
exclusive Copyright and Related Rights (defined below) upon the creator
|
| 18 |
+
and subsequent owner(s) (each and all, an "owner") of an original work of
|
| 19 |
+
authorship and/or a database (each, a "Work").
|
| 20 |
+
|
| 21 |
+
Certain owners wish to permanently relinquish those rights to a Work for
|
| 22 |
+
the purpose of contributing to a commons of creative, cultural and
|
| 23 |
+
scientific works ("Commons") that the public can reliably and without fear
|
| 24 |
+
of later claims of infringement build upon, modify, incorporate in other
|
| 25 |
+
works, reuse and redistribute as freely as possible in any form whatsoever
|
| 26 |
+
and for any purposes, including without limitation commercial purposes.
|
| 27 |
+
These owners may contribute to the Commons to promote the ideal of a free
|
| 28 |
+
culture and the further production of creative, cultural and scientific
|
| 29 |
+
works, or to gain reputation or greater distribution for their Work in
|
| 30 |
+
part through the use and efforts of others.
|
| 31 |
+
|
| 32 |
+
For these and/or other purposes and motivations, and without any
|
| 33 |
+
expectation of additional consideration or compensation, the person
|
| 34 |
+
associating CC0 with a Work (the "Affirmer"), to the extent that he or she
|
| 35 |
+
is an owner of Copyright and Related Rights in the Work, voluntarily
|
| 36 |
+
elects to apply CC0 to the Work and publicly distribute the Work under its
|
| 37 |
+
terms, with knowledge of his or her Copyright and Related Rights in the
|
| 38 |
+
Work and the meaning and intended legal effect of CC0 on those rights.
|
| 39 |
+
|
| 40 |
+
1. Copyright and Related Rights. A Work made available under CC0 may be
|
| 41 |
+
protected by copyright and related or neighboring rights ("Copyright and
|
| 42 |
+
Related Rights"). Copyright and Related Rights include, but are not
|
| 43 |
+
limited to, the following:
|
| 44 |
+
|
| 45 |
+
i. the right to reproduce, adapt, distribute, perform, display,
|
| 46 |
+
communicate, and translate a Work;
|
| 47 |
+
ii. moral rights retained by the original author(s) and/or performer(s);
|
| 48 |
+
iii. publicity and privacy rights pertaining to a person's image or
|
| 49 |
+
likeness depicted in a Work;
|
| 50 |
+
iv. rights protecting against unfair competition in regards to a Work,
|
| 51 |
+
subject to the limitations in paragraph 4(a), below;
|
| 52 |
+
v. rights protecting the extraction, dissemination, use and reuse of data
|
| 53 |
+
in a Work;
|
| 54 |
+
vi. database rights (such as those arising under Directive 96/9/EC of the
|
| 55 |
+
European Parliament and of the Council of 11 March 1996 on the legal
|
| 56 |
+
protection of databases, and under any national implementation
|
| 57 |
+
thereof, including any amended or successor version of such
|
| 58 |
+
directive); and
|
| 59 |
+
vii. other similar, equivalent or corresponding rights throughout the
|
| 60 |
+
world based on applicable law or treaty, and any national
|
| 61 |
+
implementations thereof.
|
| 62 |
+
|
| 63 |
+
2. Waiver. To the greatest extent permitted by, but not in contravention
|
| 64 |
+
of, applicable law, Affirmer hereby overtly, fully, permanently,
|
| 65 |
+
irrevocably and unconditionally waives, abandons, and surrenders all of
|
| 66 |
+
Affirmer's Copyright and Related Rights and associated claims and causes
|
| 67 |
+
of action, whether now known or unknown (including existing as well as
|
| 68 |
+
future claims and causes of action), in the Work (i) in all territories
|
| 69 |
+
worldwide, (ii) for the maximum duration provided by applicable law or
|
| 70 |
+
treaty (including future time extensions), (iii) in any current or future
|
| 71 |
+
medium and for any number of copies, and (iv) for any purpose whatsoever,
|
| 72 |
+
including without limitation commercial, advertising or promotional
|
| 73 |
+
purposes (the "Waiver"). Affirmer makes the Waiver for the benefit of each
|
| 74 |
+
member of the public at large and to the detriment of Affirmer's heirs and
|
| 75 |
+
successors, fully intending that such Waiver shall not be subject to
|
| 76 |
+
revocation, rescission, cancellation, termination, or any other legal or
|
| 77 |
+
equitable action to disrupt the quiet enjoyment of the Work by the public
|
| 78 |
+
as contemplated by Affirmer's express Statement of Purpose.
|
| 79 |
+
|
| 80 |
+
3. Public License Fallback. Should any part of the Waiver for any reason
|
| 81 |
+
be judged legally invalid or ineffective under applicable law, then the
|
| 82 |
+
Waiver shall be preserved to the maximum extent permitted taking into
|
| 83 |
+
account Affirmer's express Statement of Purpose. In addition, to the
|
| 84 |
+
extent the Waiver is so judged Affirmer hereby grants to each affected
|
| 85 |
+
person a royalty-free, non transferable, non sublicensable, non exclusive,
|
| 86 |
+
irrevocable and unconditional license to exercise Affirmer's Copyright and
|
| 87 |
+
Related Rights in the Work (i) in all territories worldwide, (ii) for the
|
| 88 |
+
maximum duration provided by applicable law or treaty (including future
|
| 89 |
+
time extensions), (iii) in any current or future medium and for any number
|
| 90 |
+
of copies, and (iv) for any purpose whatsoever, including without
|
| 91 |
+
limitation commercial, advertising or promotional purposes (the
|
| 92 |
+
"License"). The License shall be deemed effective as of the date CC0 was
|
| 93 |
+
applied by Affirmer to the Work. Should any part of the License for any
|
| 94 |
+
reason be judged legally invalid or ineffective under applicable law, such
|
| 95 |
+
partial invalidity or ineffectiveness shall not invalidate the remainder
|
| 96 |
+
of the License, and in such case Affirmer hereby affirms that he or she
|
| 97 |
+
will not (i) exercise any of his or her remaining Copyright and Related
|
| 98 |
+
Rights in the Work or (ii) assert any associated claims and causes of
|
| 99 |
+
action with respect to the Work, in either case contrary to Affirmer's
|
| 100 |
+
express Statement of Purpose.
|
| 101 |
+
|
| 102 |
+
4. Limitations and Disclaimers.
|
| 103 |
+
|
| 104 |
+
a. No trademark or patent rights held by Affirmer are waived, abandoned,
|
| 105 |
+
surrendered, licensed or otherwise affected by this document.
|
| 106 |
+
b. Affirmer offers the Work as-is and makes no representations or
|
| 107 |
+
warranties of any kind concerning the Work, express, implied,
|
| 108 |
+
statutory or otherwise, including without limitation warranties of
|
| 109 |
+
title, merchantability, fitness for a particular purpose, non
|
| 110 |
+
infringement, or the absence of latent or other defects, accuracy, or
|
| 111 |
+
the present or absence of errors, whether or not discoverable, all to
|
| 112 |
+
the greatest extent permissible under applicable law.
|
| 113 |
+
c. Affirmer disclaims responsibility for clearing rights of other persons
|
| 114 |
+
that may apply to the Work or any use thereof, including without
|
| 115 |
+
limitation any person's Copyright and Related Rights in the Work.
|
| 116 |
+
Further, Affirmer disclaims responsibility for obtaining any necessary
|
| 117 |
+
consents, permissions or other rights required for any use of the
|
| 118 |
+
Work.
|
| 119 |
+
d. Affirmer understands and acknowledges that Creative Commons is not a
|
| 120 |
+
party to this document and has no duty or obligation with respect to
|
| 121 |
+
this CC0 or use of the Work.
|
README.md
CHANGED
|
@@ -1,3 +1,319 @@
|
|
| 1 |
-
|
| 2 |
-
|
| 3 |
-
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# 🚀 Metric3D Project 🚀
|
| 2 |
+
|
| 3 |
+
**Official PyTorch implementation of Metric3Dv1 and Metric3Dv2:**
|
| 4 |
+
|
| 5 |
+
[1] [Metric3D: Towards Zero-shot Metric 3D Prediction from A Single Image](https://arxiv.org/abs/2307.10984)
|
| 6 |
+
|
| 7 |
+
[2] Metric3Dv2: A Versatile Monocular Geometric Foundation Model for Zero-shot Metric Depth and Surface Normal Estimation
|
| 8 |
+
|
| 9 |
+
<a href='https://jugghm.github.io/Metric3Dv2'><img src='https://img.shields.io/badge/project%20page-@Metric3D-yellow.svg'></a>
|
| 10 |
+
<a href='https://arxiv.org/abs/2307.10984'><img src='https://img.shields.io/badge/arxiv-@Metric3Dv1-green'></a>
|
| 11 |
+
<a href='https:'><img src='https://img.shields.io/badge/arxiv (on hold)-@Metric3Dv2-red'></a>
|
| 12 |
+
<a href='https://huggingface.co/spaces/JUGGHM/Metric3D'><img src='https://img.shields.io/badge/%F0%9F%A4%97%20Hugging%20Face-Spaces-blue'></a>
|
| 13 |
+
|
| 14 |
+
[//]: # (### [Project Page](https://arxiv.org/abs/2307.08695) | [v2 Paper](https://arxiv.org/abs/2307.10984) | [v1 Arxiv](https://arxiv.org/abs/2307.10984) | [Video](https://www.youtube.com/playlist?list=PLEuyXJsWqUNd04nwfm9gFBw5FVbcaQPl3) | [Hugging Face 🤗](https://huggingface.co/spaces/JUGGHM/Metric3D) )
|
| 15 |
+
|
| 16 |
+
## News and TO DO LIST
|
| 17 |
+
|
| 18 |
+
- [ ] Droid slam codes
|
| 19 |
+
- [ ] Release the ViT-giant2 model
|
| 20 |
+
- [ ] Focal length free mode
|
| 21 |
+
- [ ] Floating noise removing mode
|
| 22 |
+
- [ ] Improving HuggingFace Demo and Visualization
|
| 23 |
+
- [x] Release training codes
|
| 24 |
+
|
| 25 |
+
- `[2024/3/18]` HuggingFace GPU version updated!
|
| 26 |
+
- `[2024/3/18]` [Project page](https://jugghm.github.io/Metric3Dv2/) released!
|
| 27 |
+
- `[2024/3/18]` Metric3D V2 models released, supporting metric depth and surface normal now!
|
| 28 |
+
- `[2023/8/10]` Inference codes, pretrained weights, and demo released.
|
| 29 |
+
- `[2023/7]` Metric3D accepted by ICCV 2023!
|
| 30 |
+
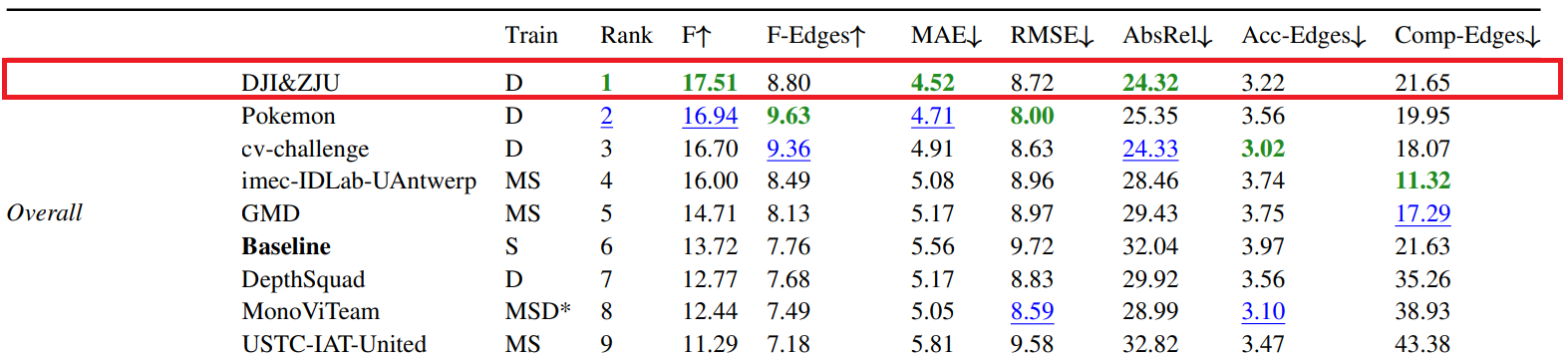
- `[2023/4]` The Champion of [2nd Monocular Depth Estimation Challenge](https://jspenmar.github.io/MDEC) in CVPR 2023
|
| 31 |
+
|
| 32 |
+
## 🌼 Abstract
|
| 33 |
+
Metric3D is a versatile geometric foundation model for high-quality and zero-shot **metric depth** and **surface normal** estimation from a single image. It excels at solving in-the-wild scene reconstruction.
|
| 34 |
+
|
| 35 |
+

|
| 36 |
+
|
| 37 |
+
|
| 38 |
+
|
| 39 |
+
## 📝 Benchmarks
|
| 40 |
+
|
| 41 |
+
### Metric Depth
|
| 42 |
+
|
| 43 |
+
[//]: # (#### Zero-shot Testing)
|
| 44 |
+
|
| 45 |
+
[//]: # (Our models work well on both indoor and outdoor scenarios, compared with other zero-shot metric depth estimation methods.)
|
| 46 |
+
|
| 47 |
+
[//]: # ()
|
| 48 |
+
[//]: # (| | Backbone | KITTI $\delta 1$ ↑ | KITTI $\delta 2$ ↑ | KITTI $\delta 3$ ↑ | KITTI AbsRel ↓ | KITTI RMSE ↓ | KITTI RMS_log ↓ | NYU $\delta 1$ ↑ | NYU $\delta 2$ ↑ | NYU $\delta 3$ ↑ | NYU AbsRel ↓ | NYU RMSE ↓ | NYU log10 ↓ |)
|
| 49 |
+
|
| 50 |
+
[//]: # (|-----------------|------------|--------------------|---------------------|--------------------|-----------------|---------------|------------------|------------------|------------------|------------------|---------------|-------------|--------------|)
|
| 51 |
+
|
| 52 |
+
[//]: # (| ZeroDepth | ResNet-18 | 0.910 | 0.980 | 0.996 | 0.057 | 4.044 | 0.083 | 0.901 | 0.961 | - | 0.100 | 0.380 | - |)
|
| 53 |
+
|
| 54 |
+
[//]: # (| PolyMax | ConvNeXt-L | - | - | - | - | - | - | 0.969 | 0.996 | 0.999 | 0.067 | 0.250 | 0.033 |)
|
| 55 |
+
|
| 56 |
+
[//]: # (| Ours | ViT-L | 0.985 | 0.995 | 0.999 | 0.052 | 2.511 | 0.074 | 0.975 | 0.994 | 0.998 | 0.063 | 0.251 | 0.028 |)
|
| 57 |
+
|
| 58 |
+
[//]: # (| Ours | ViT-g2 | 0.989 | 0.996 | 0.999 | 0.051 | 2.403 | 0.080 | 0.980 | 0.997 | 0.999 | 0.067 | 0.260 | 0.030 |)
|
| 59 |
+
|
| 60 |
+
[//]: # ()
|
| 61 |
+
[//]: # ([//]: # (| Adabins | Efficient-B5 | 0.964 | 0.995 | 0.999 | 0.058 | 2.360 | 0.088 | 0.903 | 0.984 | 0.997 | 0.103 | 0.0444 | 0.364 |))
|
| 62 |
+
[//]: # ([//]: # (| NewCRFs | SwinT-L | 0.974 | 0.997 | 0.999 | 0.052 | 2.129 | 0.079 | 0.922 | 0.983 | 0.994 | 0.095 | 0.041 | 0.334 |))
|
| 63 |
+
[//]: # ([//]: # (| Ours (CSTM_label) | ConvNeXt-L | 0.964 | 0.993 | 0.998 | 0.058 | 2.770 | 0.092 | 0.944 | 0.986 | 0.995 | 0.083 | 0.035 | 0.310 |))
|
| 64 |
+
|
| 65 |
+
[//]: # (#### Finetuned)
|
| 66 |
+
Our models rank 1st on the routing KITTI and NYU benchmarks.
|
| 67 |
+
|
| 68 |
+
| | Backbone | KITTI δ1 ↑ | KITTI δ2 ↑ | KITTI AbsRel ↓ | KITTI RMSE ↓ | KITTI RMS_log ↓ | NYU δ1 ↑ | NYU δ2 ↑ | NYU AbsRel ↓ | NYU RMSE ↓ | NYU log10 ↓ |
|
| 69 |
+
|---------------|-------------|------------|-------------|-----------------|---------------|------------------|----------|----------|---------------|-------------|--------------|
|
| 70 |
+
| ZoeDepth | ViT-Large | 0.971 | 0.995 | 0.053 | 2.281 | 0.082 | 0.953 | 0.995 | 0.077 | 0.277 | 0.033 |
|
| 71 |
+
| ZeroDepth | ResNet-18 | 0.968 | 0.996 | 0.057 | 2.087 | 0.083 | 0.954 | 0.995 | 0.074 | 0.269 | 0.103 |
|
| 72 |
+
| IEBins | SwinT-Large | 0.978 | 0.998 | 0.050 | 2.011 | 0.075 | 0.936 | 0.992 | 0.087 | 0.314 | 0.031 |
|
| 73 |
+
| DepthAnything | ViT-Large | 0.982 | 0.998 | 0.046 | 1.985 | 0.069 | 0.984 | 0.998 | 0.056 | 0.206 | 0.024 |
|
| 74 |
+
| Ours | ViT-Large | 0.985 | 0.998 | 0.999 | 1.985 | 0.064 | 0.989 | 0.998 | 0.047 | 0.183 | 0.020 |
|
| 75 |
+
| Ours | ViT-giant2 | 0.989 | 0.998 | 1.000 | 1.766 | 0.060 | 0.987 | 0.997 | 0.045 | 0.187 | 0.015 |
|
| 76 |
+
|
| 77 |
+
### Affine-invariant Depth
|
| 78 |
+
Even compared to recent affine-invariant depth methods (Marigold and Depth Anything), our metric-depth (and normal) models still show superior performance.
|
| 79 |
+
|
| 80 |
+
| | #Data for Pretrain and Train | KITTI Absrel ↓ | KITTI δ1 ↑ | NYUv2 AbsRel ↓ | NYUv2 δ1 ↑ | DIODE-Full AbsRel ↓ | DIODE-Full δ1 ↑ | Eth3d AbsRel ↓ | Eth3d δ1 ↑ |
|
| 81 |
+
|-----------------------|----------------------------------------------|----------------|------------|-----------------|------------|---------------------|-----------------|----------------------|------------|
|
| 82 |
+
| OmniData (v2, ViT-L) | 1.3M + 12.2M | 0.069 | 0.948 | 0.074 | 0.945 | 0.149 | 0.835 | 0.166 | 0.778 |
|
| 83 |
+
| MariGold (LDMv2) | 5B + 74K | 0.099 | 0.916 | 0.055 | 0.961 | 0.308 | 0.773 | 0.127 | 0.960 |
|
| 84 |
+
| DepthAnything (ViT-L) | 142M + 63M | 0.076 | 0.947 | 0.043 | 0.981 | 0.277 | 0.759 | 0.065 | 0.882 |
|
| 85 |
+
| Ours (ViT-L) | 142M + 16M | 0.042 | 0.979 | 0.042 | 0.980 | 0.141 | 0.882 | 0.042 | 0.987 |
|
| 86 |
+
| Ours (ViT-g) | 142M + 16M | 0.043 | 0.982 | 0.043 | 0.981 | 0.136 | 0.895 | 0.042 | 0.983 |
|
| 87 |
+
|
| 88 |
+
|
| 89 |
+
### Surface Normal
|
| 90 |
+
Our models also show powerful performance on normal benchmarks.
|
| 91 |
+
|
| 92 |
+
| | NYU 11.25° ↑ | NYU Mean ↓ | NYU RMS ↓ | ScanNet 11.25° ↑ | ScanNet Mean ↓ | ScanNet RMS ↓ | iBims 11.25° ↑ | iBims Mean ↓ | iBims RMS ↓ |
|
| 93 |
+
|--------------|----------|----------|-----------|-----------------|----------------|--------------|---------------|--------------|-------------|
|
| 94 |
+
| EESNU | 0.597 | 16.0 | 24.7 | 0.711 | 11.8 | 20.3 | 0.585 | 20.0 | - |
|
| 95 |
+
| IronDepth | - | - | - | - | - | - | 0.431 | 25.3 | 37.4 |
|
| 96 |
+
| PolyMax | 0.656 | 13.1 | 20.4 | - | - | - | - | - | - |
|
| 97 |
+
| Ours (ViT-L) | 0.688 | 12.0 | 19.2 | 0.760 | 9.9 | 16.4 | 0.694 | 19.4 | 34.9 |
|
| 98 |
+
| Ours (ViT-g) | 0.662 | 13.2 | 20.2 | 0.778 | 9.2 | 15.3 | 0.697 | 19.6 | 35.2 |
|
| 99 |
+
|
| 100 |
+
|
| 101 |
+
|
| 102 |
+
## 🌈 DEMOs
|
| 103 |
+
|
| 104 |
+
### Zero-shot monocular metric depth & surface normal
|
| 105 |
+
<img src="media/gifs/demo_1.gif" width="600" height="337">
|
| 106 |
+
<img src="media/gifs/demo_12.gif" width="600" height="337">
|
| 107 |
+
|
| 108 |
+
### Zero-shot metric 3D recovery
|
| 109 |
+
<img src="media/gifs/demo_2.gif" width="600" height="337">
|
| 110 |
+
|
| 111 |
+
### Improving monocular SLAM
|
| 112 |
+
<img src="media/gifs/demo_22.gif" width="600" height="337">
|
| 113 |
+
|
| 114 |
+
[//]: # (https://github.com/YvanYin/Metric3D/assets/35299633/f95815ef-2506-4193-a6d9-1163ea821268)
|
| 115 |
+
|
| 116 |
+
[//]: # (https://github.com/YvanYin/Metric3D/assets/35299633/ed00706c-41cc-49ea-accb-ad0532633cc2)
|
| 117 |
+
|
| 118 |
+
[//]: # (### Zero-shot metric 3D recovery)
|
| 119 |
+
|
| 120 |
+
[//]: # (https://github.com/YvanYin/Metric3D/assets/35299633/26cd7ae1-dd5a-4446-b275-54c5ca7ef945)
|
| 121 |
+
|
| 122 |
+
[//]: # (https://github.com/YvanYin/Metric3D/assets/35299633/21e5484b-c304-4fe3-b1d3-8eebc4e26e42)
|
| 123 |
+
[//]: # (### Monocular reconstruction for a Sequence)
|
| 124 |
+
|
| 125 |
+
[//]: # ()
|
| 126 |
+
[//]: # (### In-the-wild 3D reconstruction)
|
| 127 |
+
|
| 128 |
+
[//]: # ()
|
| 129 |
+
[//]: # (| | Image | Reconstruction | Pointcloud File |)
|
| 130 |
+
|
| 131 |
+
[//]: # (|:---------:|:------------------:|:------------------:|:--------:|)
|
| 132 |
+
|
| 133 |
+
[//]: # (| room | <img src="data/wild_demo/jonathan-borba-CnthDZXCdoY-unsplash.jpg" width="300" height="335"> | <img src="media/gifs/room.gif" width="300" height="335"> | [Download](https://drive.google.com/file/d/1P1izSegH2c4LUrXGiUksw037PVb0hjZr/view?usp=drive_link) |)
|
| 134 |
+
|
| 135 |
+
[//]: # (| Colosseum | <img src="data/wild_demo/david-kohler-VFRTXGw1VjU-unsplash.jpg" width="300" height="169"> | <img src="media/gifs/colo.gif" width="300" height="169"> | [Download](https://drive.google.com/file/d/1jJCXe5IpxBhHDr0TZtNZhjxKTRUz56Hg/view?usp=drive_link) |)
|
| 136 |
+
|
| 137 |
+
[//]: # (| chess | <img src="data/wild_demo/randy-fath-G1yhU1Ej-9A-unsplash.jpg" width="300" height="169" align=center> | <img src="media/gifs/chess.gif" width="300" height="169"> | [Download](https://drive.google.com/file/d/1oV_Foq25_p-tTDRTcyO2AzXEdFJQz-Wm/view?usp=drive_link) |)
|
| 138 |
+
|
| 139 |
+
[//]: # ()
|
| 140 |
+
[//]: # (All three images are downloaded from [unplash](https://unsplash.com/) and put in the data/wild_demo directory.)
|
| 141 |
+
|
| 142 |
+
[//]: # ()
|
| 143 |
+
[//]: # (### 3D metric reconstruction, Metric3D × DroidSLAM)
|
| 144 |
+
|
| 145 |
+
[//]: # (Metric3D can also provide scale information for DroidSLAM, help to solve the scale drift problem for better trajectories. )
|
| 146 |
+
|
| 147 |
+
[//]: # ()
|
| 148 |
+
[//]: # (#### Bird Eyes' View (Left: Droid-SLAM (mono). Right: Droid-SLAM with Metric-3D))
|
| 149 |
+
|
| 150 |
+
[//]: # ()
|
| 151 |
+
[//]: # (<div align=center>)
|
| 152 |
+
|
| 153 |
+
[//]: # (<img src="media/gifs/0028.gif"> )
|
| 154 |
+
|
| 155 |
+
[//]: # (</div>)
|
| 156 |
+
|
| 157 |
+
[//]: # ()
|
| 158 |
+
[//]: # (### Front View)
|
| 159 |
+
|
| 160 |
+
[//]: # ()
|
| 161 |
+
[//]: # (<div align=center>)
|
| 162 |
+
|
| 163 |
+
[//]: # (<img src="media/gifs/0028_fv.gif"> )
|
| 164 |
+
|
| 165 |
+
[//]: # (</div>)
|
| 166 |
+
|
| 167 |
+
[//]: # ()
|
| 168 |
+
[//]: # (#### KITTI odemetry evaluation (Translational RMS drift (t_rel, ↓) / Rotational RMS drift (r_rel, ↓)))
|
| 169 |
+
|
| 170 |
+
[//]: # (| | Modality | seq 00 | seq 02 | seq 05 | seq 06 | seq 08 | seq 09 | seq 10 |)
|
| 171 |
+
|
| 172 |
+
[//]: # (|:----------:|:--------:|:----------:|:----------:|:---------:|:----------:|:----------:|:---------:|:---------:|)
|
| 173 |
+
|
| 174 |
+
[//]: # (| ORB-SLAM2 | Mono | 11.43/0.58 | 10.34/0.26 | 9.04/0.26 | 14.56/0.26 | 11.46/0.28 | 9.3/0.26 | 2.57/0.32 |)
|
| 175 |
+
|
| 176 |
+
[//]: # (| Droid-SLAM | Mono | 33.9/0.29 | 34.88/0.27 | 23.4/0.27 | 17.2/0.26 | 39.6/0.31 | 21.7/0.23 | 7/0.25 |)
|
| 177 |
+
|
| 178 |
+
[//]: # (| Droid+Ours | Mono | 1.44/0.37 | 2.64/0.29 | 1.44/0.25 | 0.6/0.2 | 2.2/0.3 | 1.63/0.22 | 2.73/0.23 |)
|
| 179 |
+
|
| 180 |
+
[//]: # (| ORB-SLAM2 | Stereo | 0.88/0.31 | 0.77/0.28 | 0.62/0.26 | 0.89/0.27 | 1.03/0.31 | 0.86/0.25 | 0.62/0.29 |)
|
| 181 |
+
|
| 182 |
+
[//]: # ()
|
| 183 |
+
[//]: # (Metric3D makes the mono-SLAM scale-aware, like stereo systems.)
|
| 184 |
+
|
| 185 |
+
[//]: # ()
|
| 186 |
+
[//]: # (#### KITTI sequence videos - Youtube)
|
| 187 |
+
|
| 188 |
+
[//]: # ([2011_09_30_drive_0028](https://youtu.be/gcTB4MgVCLQ) /)
|
| 189 |
+
|
| 190 |
+
[//]: # ([2011_09_30_drive_0033](https://youtu.be/He581fmoPP4) /)
|
| 191 |
+
|
| 192 |
+
[//]: # ([2011_09_30_drive_0034](https://youtu.be/I3PkukQ3_F8))
|
| 193 |
+
|
| 194 |
+
[//]: # ()
|
| 195 |
+
[//]: # (#### Estimated pose)
|
| 196 |
+
|
| 197 |
+
[//]: # ([2011_09_30_drive_0033](https://drive.google.com/file/d/1SMXWzLYrEdmBe6uYMR9ShtDXeFDewChv/view?usp=drive_link) / )
|
| 198 |
+
|
| 199 |
+
[//]: # ([2011_09_30_drive_0034](https://drive.google.com/file/d/1ONU4GxpvTlgW0TjReF1R2i-WFxbbjQPG/view?usp=drive_link) /)
|
| 200 |
+
|
| 201 |
+
[//]: # ([2011_10_03_drive_0042](https://drive.google.com/file/d/19fweg6p1Q6TjJD2KlD7EMA_aV4FIeQUD/view?usp=drive_link))
|
| 202 |
+
|
| 203 |
+
[//]: # ()
|
| 204 |
+
[//]: # (#### Pointcloud files)
|
| 205 |
+
|
| 206 |
+
[//]: # ([2011_09_30_drive_0033](https://drive.google.com/file/d/1K0o8DpUmLf-f_rue0OX1VaHlldpHBAfw/view?usp=drive_link) /)
|
| 207 |
+
|
| 208 |
+
[//]: # ([2011_09_30_drive_0034](https://drive.google.com/file/d/1bvZ6JwMRyvi07H7Z2VD_0NX1Im8qraZo/view?usp=drive_link) /)
|
| 209 |
+
|
| 210 |
+
[//]: # ([2011_10_03_drive_0042](https://drive.google.com/file/d/1Vw59F8nN5ApWdLeGKXvYgyS9SNKHKy4x/view?usp=drive_link))
|
| 211 |
+
|
| 212 |
+
## 🔨 Installation
|
| 213 |
+
### One-line Installation
|
| 214 |
+
For the ViT models, use the following environment:
|
| 215 |
+
```bash
|
| 216 |
+
pip install -r requirements_v2.txt
|
| 217 |
+
```
|
| 218 |
+
|
| 219 |
+
For ConvNeXt-L, it is
|
| 220 |
+
```bash
|
| 221 |
+
pip install -r requirements_v1.txt
|
| 222 |
+
```
|
| 223 |
+
|
| 224 |
+
### dataset annotation components
|
| 225 |
+
With off-the-shelf depth datasets, we need to generate json annotaions in compatible with this dataset, which is organized by:
|
| 226 |
+
```
|
| 227 |
+
dict(
|
| 228 |
+
'files':list(
|
| 229 |
+
dict(
|
| 230 |
+
'rgb': 'data/kitti_demo/rgb/xxx.png',
|
| 231 |
+
'depth': 'data/kitti_demo/depth/xxx.png',
|
| 232 |
+
'depth_scale': 1000.0 # the depth scale of gt depth img.
|
| 233 |
+
'cam_in': [fx, fy, cx, cy],
|
| 234 |
+
),
|
| 235 |
+
|
| 236 |
+
dict(
|
| 237 |
+
...
|
| 238 |
+
),
|
| 239 |
+
|
| 240 |
+
...
|
| 241 |
+
)
|
| 242 |
+
)
|
| 243 |
+
```
|
| 244 |
+
To generate such annotations, please refer to the "Inference" section.
|
| 245 |
+
|
| 246 |
+
### configs
|
| 247 |
+
In ```mono/configs``` we provide different config setups.
|
| 248 |
+
|
| 249 |
+
Intrinsics of the canonical camera is set bellow:
|
| 250 |
+
```
|
| 251 |
+
canonical_space = dict(
|
| 252 |
+
img_size=(512, 960),
|
| 253 |
+
focal_length=1000.0,
|
| 254 |
+
),
|
| 255 |
+
```
|
| 256 |
+
where cx and cy is set to be half of the image size.
|
| 257 |
+
|
| 258 |
+
Inference settings are defined as
|
| 259 |
+
```
|
| 260 |
+
depth_range=(0, 1),
|
| 261 |
+
depth_normalize=(0.3, 150),
|
| 262 |
+
crop_size = (512, 1088),
|
| 263 |
+
```
|
| 264 |
+
where the images will be first resized as the ```crop_size``` and then fed into the model.
|
| 265 |
+
|
| 266 |
+
## ✈️ Inference
|
| 267 |
+
### Download Checkpoint
|
| 268 |
+
| | Encoder | Decoder | Link |
|
| 269 |
+
|:----:|:-------------------:|:-----------------:|:-------------------------------------------------------------------------------------------------:|
|
| 270 |
+
| v1-T | ConvNeXt-Tiny | Hourglass-Decoder | Coming soon |
|
| 271 |
+
| v1-L | ConvNeXt-Large | Hourglass-Decoder | [Download](https://drive.google.com/file/d/1KVINiBkVpJylx_6z1lAC7CQ4kmn-RJRN/view?usp=drive_link) |
|
| 272 |
+
| v2-S | DINO2reg-ViT-Small | RAFT-4iter | [Download](https://drive.google.com/file/d/1YfmvXwpWmhLg3jSxnhT7LvY0yawlXcr_/view?usp=drive_link) |
|
| 273 |
+
| v2-L | DINO2reg-ViT-Large | RAFT-8iter | [Download](https://drive.google.com/file/d/1eT2gG-kwsVzNy5nJrbm4KC-9DbNKyLnr/view?usp=drive_link) |
|
| 274 |
+
| v2-g | DINO2reg-ViT-giant2 | RAFT-8iter | Coming soon |
|
| 275 |
+
|
| 276 |
+
### Dataset Mode
|
| 277 |
+
1. put the trained ckpt file ```model.pth``` in ```weight/```.
|
| 278 |
+
2. generate data annotation by following the code ```data/gene_annos_kitti_demo.py```, which includes 'rgb', (optional) 'intrinsic', (optional) 'depth', (optional) 'depth_scale'.
|
| 279 |
+
3. change the 'test_data_path' in ```test_*.sh``` to the ```*.json``` path.
|
| 280 |
+
4. run ```source test_kitti.sh``` or ```source test_nyu.sh```.
|
| 281 |
+
|
| 282 |
+
### In-the-Wild Mode
|
| 283 |
+
1. put the trained ckpt file ```model.pth``` in ```weight/```.
|
| 284 |
+
2. change the 'test_data_path' in ```test.sh``` to the image folder path.
|
| 285 |
+
3. run ```source test_vit.sh``` for transformers and ```source test.sh``` for convnets.
|
| 286 |
+
As no intrinsics are provided, we provided by default 9 settings of focal length.
|
| 287 |
+
|
| 288 |
+
## ❓ Q & A
|
| 289 |
+
### Q1: Why depth maps look good but pointclouds are distorted?
|
| 290 |
+
Because the focal length is not properly set! Please find a proper focal length by modifying codes [here](mono/utils/do_test.py#309) yourself.
|
| 291 |
+
|
| 292 |
+
### Q2: Why the pointclouds are too slow to be generated?
|
| 293 |
+
Because the images are too large! Use smaller ones instead.
|
| 294 |
+
|
| 295 |
+
### Q3: Why predicted depth maps are not satisfactory?
|
| 296 |
+
First be sure all black padding regions at image boundaries are cropped out. Then please try again.
|
| 297 |
+
Besides, metric 3D is not almighty. Some objects (chandeliers, drones...) / camera views (aerial view, bev...) do not occur frequently in the training datasets. We will going deeper into this and release more powerful solutions.
|
| 298 |
+
|
| 299 |
+
## 📧 Citation
|
| 300 |
+
```
|
| 301 |
+
@article{hu2024metric3dv2,
|
| 302 |
+
title={A Versatile Monocular Geometric Foundation Model for Zero-shot Metric Depth and Surface Normal Estimation},
|
| 303 |
+
author={Hu, Mu and Yin, Wei, and Zhang, Chi and Cai, Zhipeng and Long, Xiaoxiao and Chen, Hao, and Wang, Kaixuan and Yu, Gang and Shen, Chunhua and Shen, Shaojie},
|
| 304 |
+
booktitle={arXiv},
|
| 305 |
+
year={2024}
|
| 306 |
+
}
|
| 307 |
+
```
|
| 308 |
+
```
|
| 309 |
+
@article{yin2023metric,
|
| 310 |
+
title={Metric3D: Towards Zero-shot Metric 3D Prediction from A Single Image},
|
| 311 |
+
author={Wei Yin, Chi Zhang, Hao Chen, Zhipeng Cai, Gang Yu, Kaixuan Wang, Xiaozhi Chen, Chunhua Shen},
|
| 312 |
+
booktitle={ICCV},
|
| 313 |
+
year={2023}
|
| 314 |
+
}
|
| 315 |
+
```
|
| 316 |
+
|
| 317 |
+
## License and Contact
|
| 318 |
+
|
| 319 |
+
The *Metric 3D* code is under a 2-clause BSD License for non-commercial usage. For further questions, contact Dr. yvan.yin [yvanwy@outlook.com] and Mr. mu.hu [mhuam@connect.ust.hk].
|
data/gene_annos_kitti_demo.py
ADDED
|
@@ -0,0 +1,32 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
if __name__=='__main__':
|
| 2 |
+
import os
|
| 3 |
+
import os.path as osp
|
| 4 |
+
import numpy as np
|
| 5 |
+
import cv2
|
| 6 |
+
import json
|
| 7 |
+
|
| 8 |
+
code_root = '/mnt/nas/share/home/xugk/MetricDepth_test/'
|
| 9 |
+
|
| 10 |
+
data_root = osp.join(code_root, 'data/kitti_demo')
|
| 11 |
+
split_root = code_root
|
| 12 |
+
|
| 13 |
+
files = []
|
| 14 |
+
rgb_root = osp.join(data_root, 'rgb')
|
| 15 |
+
depth_root = osp.join(data_root, 'depth')
|
| 16 |
+
for rgb_file in os.listdir(rgb_root):
|
| 17 |
+
rgb_path = osp.join(rgb_root, rgb_file).split(split_root)[-1]
|
| 18 |
+
depth_path = rgb_path.replace('/rgb/', '/depth/')
|
| 19 |
+
cam_in = [707.0493, 707.0493, 604.0814, 180.5066]
|
| 20 |
+
depth_scale = 256.
|
| 21 |
+
|
| 22 |
+
meta_data = {}
|
| 23 |
+
meta_data['cam_in'] = cam_in
|
| 24 |
+
meta_data['rgb'] = rgb_path
|
| 25 |
+
meta_data['depth'] = depth_path
|
| 26 |
+
meta_data['depth_scale'] = depth_scale
|
| 27 |
+
files.append(meta_data)
|
| 28 |
+
files_dict = dict(files=files)
|
| 29 |
+
|
| 30 |
+
with open(osp.join(code_root, 'data/kitti_demo/test_annotations.json'), 'w') as f:
|
| 31 |
+
json.dump(files_dict, f)
|
| 32 |
+
|
data/gene_annos_nyu_demo.py
ADDED
|
@@ -0,0 +1,31 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
if __name__=='__main__':
|
| 2 |
+
import os
|
| 3 |
+
import os.path as osp
|
| 4 |
+
import numpy as np
|
| 5 |
+
import cv2
|
| 6 |
+
import json
|
| 7 |
+
|
| 8 |
+
code_root = '/mnt/nas/share/home/xugk/MetricDepth_test/'
|
| 9 |
+
|
| 10 |
+
data_root = osp.join(code_root, 'data/nyu_demo')
|
| 11 |
+
split_root = code_root
|
| 12 |
+
|
| 13 |
+
files = []
|
| 14 |
+
rgb_root = osp.join(data_root, 'rgb')
|
| 15 |
+
depth_root = osp.join(data_root, 'depth')
|
| 16 |
+
for rgb_file in os.listdir(rgb_root):
|
| 17 |
+
rgb_path = osp.join(rgb_root, rgb_file).split(split_root)[-1]
|
| 18 |
+
depth_path = rgb_path.replace('.jpg', '.png').replace('/rgb_', '/sync_depth_').replace('/rgb/', '/depth/')
|
| 19 |
+
cam_in = [518.8579, 519.46961, 325.58245, 253.73617]
|
| 20 |
+
depth_scale = 1000.
|
| 21 |
+
|
| 22 |
+
meta_data = {}
|
| 23 |
+
meta_data['cam_in'] = cam_in
|
| 24 |
+
meta_data['rgb'] = rgb_path
|
| 25 |
+
meta_data['depth'] = depth_path
|
| 26 |
+
meta_data['depth_scale'] = depth_scale
|
| 27 |
+
files.append(meta_data)
|
| 28 |
+
files_dict = dict(files=files)
|
| 29 |
+
|
| 30 |
+
with open(osp.join(code_root, 'data/nyu_demo/test_annotations.json'), 'w') as f:
|
| 31 |
+
json.dump(files_dict, f)
|
data/kitti_demo/depth/0000000005.png
ADDED

|
Git LFS Details
|
data/kitti_demo/depth/0000000050.png
ADDED

|
Git LFS Details
|
data/kitti_demo/depth/0000000100.png
ADDED

|
Git LFS Details
|
data/kitti_demo/rgb/0000000005.png
ADDED

|
Git LFS Details
|
data/kitti_demo/rgb/0000000050.png
ADDED

|
Git LFS Details
|
data/kitti_demo/rgb/0000000100.png
ADDED

|
Git LFS Details
|
data/kitti_demo/test_annotations.json
ADDED
|
@@ -0,0 +1 @@
|
|
|
|
|
|
|
| 1 |
+
{"files": [{"cam_in": [707.0493, 707.0493, 604.0814, 180.5066], "rgb": "data/kitti_demo/rgb/0000000050.png", "depth": "data/kitti_demo/depth/0000000050.png", "depth_scale": 256.0}, {"cam_in": [707.0493, 707.0493, 604.0814, 180.5066], "rgb": "data/kitti_demo/rgb/0000000100.png", "depth": "data/kitti_demo/depth/0000000100.png", "depth_scale": 256.0}, {"cam_in": [707.0493, 707.0493, 604.0814, 180.5066], "rgb": "data/kitti_demo/rgb/0000000005.png", "depth": "data/kitti_demo/depth/0000000005.png", "depth_scale": 256.0}]}
|
data/nyu_demo/depth/sync_depth_00000.png
ADDED

|
Git LFS Details
|
data/nyu_demo/depth/sync_depth_00050.png
ADDED

|
Git LFS Details
|
data/nyu_demo/depth/sync_depth_00100.png
ADDED

|
Git LFS Details
|
data/nyu_demo/rgb/rgb_00000.jpg
ADDED

|
data/nyu_demo/rgb/rgb_00050.jpg
ADDED

|
data/nyu_demo/rgb/rgb_00100.jpg
ADDED

|
data/nyu_demo/test_annotations.json
ADDED
|
@@ -0,0 +1 @@
|
|
|
|
|
|
|
| 1 |
+
{"files": [{"cam_in": [518.8579, 519.46961, 325.58245, 253.73617], "rgb": "data/nyu_demo/rgb/rgb_00000.jpg", "depth": "data/nyu_demo/depth/sync_depth_00000.png", "depth_scale": 1000.0}, {"cam_in": [518.8579, 519.46961, 325.58245, 253.73617], "rgb": "data/nyu_demo/rgb/rgb_00050.jpg", "depth": "data/nyu_demo/depth/sync_depth_00050.png", "depth_scale": 1000.0}, {"cam_in": [518.8579, 519.46961, 325.58245, 253.73617], "rgb": "data/nyu_demo/rgb/rgb_00100.jpg", "depth": "data/nyu_demo/depth/sync_depth_00100.png", "depth_scale": 1000.0}]}
|
data/wild_demo/david-kohler-VFRTXGw1VjU-unsplash.jpg
ADDED

|
data/wild_demo/jonathan-borba-CnthDZXCdoY-unsplash.jpg
ADDED

|
data/wild_demo/randy-fath-G1yhU1Ej-9A-unsplash.jpg
ADDED

|
data_info/__init__.py
ADDED
|
@@ -0,0 +1,2 @@
|
|
|
|
|
|
|
|
|
|
| 1 |
+
from .public_datasets import *
|
| 2 |
+
from .pretrained_weight import *
|
data_info/pretrained_weight.py
ADDED
|
@@ -0,0 +1,16 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
|
| 2 |
+
mldb_info={}
|
| 3 |
+
|
| 4 |
+
mldb_info['checkpoint']={
|
| 5 |
+
'mldb_root': '/mnt/nas/share/home/xugk/ckpt', # NOTE: modify it to the pretrained ckpt root
|
| 6 |
+
|
| 7 |
+
# pretrained weight for convnext
|
| 8 |
+
'convnext_tiny': 'convnext/convnext_tiny_22k_1k_384.pth',
|
| 9 |
+
'convnext_small': 'convnext/convnext_small_22k_1k_384.pth',
|
| 10 |
+
'convnext_base': 'convnext/convnext_base_22k_1k_384.pth',
|
| 11 |
+
'convnext_large': 'convnext/convnext_large_22k_1k_384.pth',
|
| 12 |
+
'vit_large': 'vit/dinov2_vitl14_pretrain.pth',
|
| 13 |
+
'vit_small_reg': 'vit/dinov2_vits14_reg4_pretrain.pth',
|
| 14 |
+
'vit_large_reg': 'vit/dinov2_vitl14_reg4_pretrain.pth',
|
| 15 |
+
'vit_giant2_reg': 'vit/dinov2_vitg14_reg4_pretrain.pth',
|
| 16 |
+
}
|
data_info/public_datasets.py
ADDED
|
@@ -0,0 +1,7 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
mldb_info = {}
|
| 2 |
+
|
| 3 |
+
mldb_info['NYU']={
|
| 4 |
+
'mldb_root': '/mnt/nas/share/home/xugk/data/',
|
| 5 |
+
'data_root': 'nyu',
|
| 6 |
+
'test_annotations_path': 'nyu/test_annotation.json',
|
| 7 |
+
}
|
media/gifs/demo_1.gif
ADDED

|
Git LFS Details
|
media/gifs/demo_12.gif
ADDED

|
Git LFS Details
|
media/gifs/demo_2.gif
ADDED

|
Git LFS Details
|
media/gifs/demo_22.gif
ADDED

|
Git LFS Details
|
media/screenshots/challenge.PNG
ADDED
|
media/screenshots/page2.png
ADDED

|
Git LFS Details
|
media/screenshots/pipeline.png
ADDED

|
Git LFS Details
|
mono/configs/HourglassDecoder/convlarge.0.3_150.py
ADDED
|
@@ -0,0 +1,25 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
_base_=[
|
| 2 |
+
'../_base_/models/encoder_decoder/convnext_large.hourglassdecoder.py',
|
| 3 |
+
'../_base_/datasets/_data_base_.py',
|
| 4 |
+
'../_base_/default_runtime.py',
|
| 5 |
+
]
|
| 6 |
+
|
| 7 |
+
model = dict(
|
| 8 |
+
backbone=dict(
|
| 9 |
+
pretrained=False,
|
| 10 |
+
)
|
| 11 |
+
)
|
| 12 |
+
|
| 13 |
+
# configs of the canonical space
|
| 14 |
+
data_basic=dict(
|
| 15 |
+
canonical_space = dict(
|
| 16 |
+
img_size=(512, 960),
|
| 17 |
+
focal_length=1000.0,
|
| 18 |
+
),
|
| 19 |
+
depth_range=(0, 1),
|
| 20 |
+
depth_normalize=(0.3, 150),
|
| 21 |
+
crop_size = (544, 1216),
|
| 22 |
+
)
|
| 23 |
+
|
| 24 |
+
batchsize_per_gpu = 2
|
| 25 |
+
thread_per_gpu = 4
|
mono/configs/HourglassDecoder/test_kitti_convlarge.0.3_150.py
ADDED
|
@@ -0,0 +1,25 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
_base_=[
|
| 2 |
+
'../_base_/models/encoder_decoder/convnext_large.hourglassdecoder.py',
|
| 3 |
+
'../_base_/datasets/_data_base_.py',
|
| 4 |
+
'../_base_/default_runtime.py',
|
| 5 |
+
]
|
| 6 |
+
|
| 7 |
+
model = dict(
|
| 8 |
+
backbone=dict(
|
| 9 |
+
pretrained=False,
|
| 10 |
+
)
|
| 11 |
+
)
|
| 12 |
+
|
| 13 |
+
# configs of the canonical space
|
| 14 |
+
data_basic=dict(
|
| 15 |
+
canonical_space = dict(
|
| 16 |
+
img_size=(512, 960),
|
| 17 |
+
focal_length=1000.0,
|
| 18 |
+
),
|
| 19 |
+
depth_range=(0, 1),
|
| 20 |
+
depth_normalize=(0.3, 150),
|
| 21 |
+
crop_size = (512, 1088),
|
| 22 |
+
)
|
| 23 |
+
|
| 24 |
+
batchsize_per_gpu = 2
|
| 25 |
+
thread_per_gpu = 4
|
mono/configs/HourglassDecoder/test_nyu_convlarge.0.3_150.py
ADDED
|
@@ -0,0 +1,25 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
_base_=[
|
| 2 |
+
'../_base_/models/encoder_decoder/convnext_large.hourglassdecoder.py',
|
| 3 |
+
'../_base_/datasets/_data_base_.py',
|
| 4 |
+
'../_base_/default_runtime.py',
|
| 5 |
+
]
|
| 6 |
+
|
| 7 |
+
model = dict(
|
| 8 |
+
backbone=dict(
|
| 9 |
+
pretrained=False,
|
| 10 |
+
)
|
| 11 |
+
)
|
| 12 |
+
|
| 13 |
+
# configs of the canonical space
|
| 14 |
+
data_basic=dict(
|
| 15 |
+
canonical_space = dict(
|
| 16 |
+
img_size=(512, 960),
|
| 17 |
+
focal_length=1000.0,
|
| 18 |
+
),
|
| 19 |
+
depth_range=(0, 1),
|
| 20 |
+
depth_normalize=(0.3, 150),
|
| 21 |
+
crop_size = (480, 1216),
|
| 22 |
+
)
|
| 23 |
+
|
| 24 |
+
batchsize_per_gpu = 2
|
| 25 |
+
thread_per_gpu = 4
|
mono/configs/HourglassDecoder/vit.raft5.large.py
ADDED
|
@@ -0,0 +1,33 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
_base_=[
|
| 2 |
+
'../_base_/models/encoder_decoder/dino_vit_large_reg.dpt_raft.py',
|
| 3 |
+
'../_base_/datasets/_data_base_.py',
|
| 4 |
+
'../_base_/default_runtime.py',
|
| 5 |
+
]
|
| 6 |
+
|
| 7 |
+
import numpy as np
|
| 8 |
+
model=dict(
|
| 9 |
+
decode_head=dict(
|
| 10 |
+
type='RAFTDepthNormalDPT5',
|
| 11 |
+
iters=8,
|
| 12 |
+
n_downsample=2,
|
| 13 |
+
detach=False,
|
| 14 |
+
)
|
| 15 |
+
)
|
| 16 |
+
|
| 17 |
+
|
| 18 |
+
max_value = 200
|
| 19 |
+
# configs of the canonical space
|
| 20 |
+
data_basic=dict(
|
| 21 |
+
canonical_space = dict(
|
| 22 |
+
# img_size=(540, 960),
|
| 23 |
+
focal_length=1000.0,
|
| 24 |
+
),
|
| 25 |
+
depth_range=(0, 1),
|
| 26 |
+
depth_normalize=(0.1, max_value),
|
| 27 |
+
crop_size = (616, 1064), # %28 = 0
|
| 28 |
+
clip_depth_range=(0.1, 200),
|
| 29 |
+
vit_size=(616,1064)
|
| 30 |
+
)
|
| 31 |
+
|
| 32 |
+
batchsize_per_gpu = 1
|
| 33 |
+
thread_per_gpu = 1
|
mono/configs/HourglassDecoder/vit.raft5.small.py
ADDED
|
@@ -0,0 +1,33 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
_base_=[
|
| 2 |
+
'../_base_/models/encoder_decoder/dino_vit_small_reg.dpt_raft.py',
|
| 3 |
+
'../_base_/datasets/_data_base_.py',
|
| 4 |
+
'../_base_/default_runtime.py',
|
| 5 |
+
]
|
| 6 |
+
|
| 7 |
+
import numpy as np
|
| 8 |
+
model=dict(
|
| 9 |
+
decode_head=dict(
|
| 10 |
+
type='RAFTDepthNormalDPT5',
|
| 11 |
+
iters=4,
|
| 12 |
+
n_downsample=2,
|
| 13 |
+
detach=False,
|
| 14 |
+
)
|
| 15 |
+
)
|
| 16 |
+
|
| 17 |
+
|
| 18 |
+
max_value = 200
|
| 19 |
+
# configs of the canonical space
|
| 20 |
+
data_basic=dict(
|
| 21 |
+
canonical_space = dict(
|
| 22 |
+
# img_size=(540, 960),
|
| 23 |
+
focal_length=1000.0,
|
| 24 |
+
),
|
| 25 |
+
depth_range=(0, 1),
|
| 26 |
+
depth_normalize=(0.1, max_value),
|
| 27 |
+
crop_size = (616, 1064), # %28 = 0
|
| 28 |
+
clip_depth_range=(0.1, 200),
|
| 29 |
+
vit_size=(616,1064)
|
| 30 |
+
)
|
| 31 |
+
|
| 32 |
+
batchsize_per_gpu = 1
|
| 33 |
+
thread_per_gpu = 1
|
mono/configs/__init__.py
ADDED
|
@@ -0,0 +1 @@
|
|
|
|
|
|
|
| 1 |
+
|
mono/configs/_base_/_data_base_.py
ADDED
|
@@ -0,0 +1,13 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# canonical camera setting and basic data setting
|
| 2 |
+
# we set it same as the E300 camera (crop version)
|
| 3 |
+
#
|
| 4 |
+
data_basic=dict(
|
| 5 |
+
canonical_space = dict(
|
| 6 |
+
img_size=(540, 960),
|
| 7 |
+
focal_length=1196.0,
|
| 8 |
+
),
|
| 9 |
+
depth_range=(0.9, 150),
|
| 10 |
+
depth_normalize=(0.006, 1.001),
|
| 11 |
+
crop_size = (512, 960),
|
| 12 |
+
clip_depth_range=(0.9, 150),
|
| 13 |
+
)
|
mono/configs/_base_/datasets/_data_base_.py
ADDED
|
@@ -0,0 +1,12 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# canonical camera setting and basic data setting
|
| 2 |
+
#
|
| 3 |
+
data_basic=dict(
|
| 4 |
+
canonical_space = dict(
|
| 5 |
+
img_size=(540, 960),
|
| 6 |
+
focal_length=1196.0,
|
| 7 |
+
),
|
| 8 |
+
depth_range=(0.9, 150),
|
| 9 |
+
depth_normalize=(0.006, 1.001),
|
| 10 |
+
crop_size = (512, 960),
|
| 11 |
+
clip_depth_range=(0.9, 150),
|
| 12 |
+
)
|
mono/configs/_base_/default_runtime.py
ADDED
|
@@ -0,0 +1,4 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
|
| 2 |
+
load_from = None
|
| 3 |
+
cudnn_benchmark = True
|
| 4 |
+
test_metrics = ['abs_rel', 'rmse', 'silog', 'delta1', 'delta2', 'delta3','rmse_log', 'log10', 'sq_rel']
|
mono/configs/_base_/models/backbones/convnext_large.py
ADDED
|
@@ -0,0 +1,16 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
#_base_ = ['./_model_base_.py',]
|
| 2 |
+
|
| 3 |
+
#'https://download.openmmlab.com/mmclassification/v0/convnext/downstream/convnext-large_3rdparty_in21k_20220301-e6e0ea0a.pth'
|
| 4 |
+
model = dict(
|
| 5 |
+
#type='EncoderDecoderAuxi',
|
| 6 |
+
backbone=dict(
|
| 7 |
+
type='convnext_large',
|
| 8 |
+
pretrained=True,
|
| 9 |
+
in_22k=True,
|
| 10 |
+
out_indices=[0, 1, 2, 3],
|
| 11 |
+
drop_path_rate=0.4,
|
| 12 |
+
layer_scale_init_value=1.0,
|
| 13 |
+
checkpoint='data/pretrained_weight_repo/convnext/convnext_large_22k_1k_384.pth',
|
| 14 |
+
prefix='backbones.',
|
| 15 |
+
out_channels=[192, 384, 768, 1536]),
|
| 16 |
+
)
|
mono/configs/_base_/models/backbones/dino_vit_large.py
ADDED
|
@@ -0,0 +1,7 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
model = dict(
|
| 2 |
+
backbone=dict(
|
| 3 |
+
type='vit_large',
|
| 4 |
+
prefix='backbones.',
|
| 5 |
+
out_channels=[1024, 1024, 1024, 1024],
|
| 6 |
+
drop_path_rate = 0.0),
|
| 7 |
+
)
|
mono/configs/_base_/models/backbones/dino_vit_large_reg.py
ADDED
|
@@ -0,0 +1,7 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
model = dict(
|
| 2 |
+
backbone=dict(
|
| 3 |
+
type='vit_large_reg',
|
| 4 |
+
prefix='backbones.',
|
| 5 |
+
out_channels=[1024, 1024, 1024, 1024],
|
| 6 |
+
drop_path_rate = 0.0),
|
| 7 |
+
)
|
mono/configs/_base_/models/backbones/dino_vit_small_reg.py
ADDED
|
@@ -0,0 +1,7 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
model = dict(
|
| 2 |
+
backbone=dict(
|
| 3 |
+
type='vit_small_reg',
|
| 4 |
+
prefix='backbones.',
|
| 5 |
+
out_channels=[384, 384, 384, 384],
|
| 6 |
+
drop_path_rate = 0.0),
|
| 7 |
+
)
|
mono/configs/_base_/models/encoder_decoder/convnext_large.hourglassdecoder.py
ADDED
|
@@ -0,0 +1,10 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# model settings
|
| 2 |
+
_base_ = ['../backbones/convnext_large.py',]
|
| 3 |
+
model = dict(
|
| 4 |
+
type='DensePredModel',
|
| 5 |
+
decode_head=dict(
|
| 6 |
+
type='HourglassDecoder',
|
| 7 |
+
in_channels=[192, 384, 768, 1536],
|
| 8 |
+
decoder_channel=[128, 128, 256, 512],
|
| 9 |
+
prefix='decode_heads.'),
|
| 10 |
+
)
|
mono/configs/_base_/models/encoder_decoder/dino_vit_large.dpt_raft.py
ADDED
|
@@ -0,0 +1,20 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# model settings
|
| 2 |
+
_base_ = ['../backbones/dino_vit_large.py']
|
| 3 |
+
model = dict(
|
| 4 |
+
type='DensePredModel',
|
| 5 |
+
decode_head=dict(
|
| 6 |
+
type='RAFTDepthDPT',
|
| 7 |
+
in_channels=[1024, 1024, 1024, 1024],
|
| 8 |
+
use_cls_token=True,
|
| 9 |
+
feature_channels = [256, 512, 1024, 1024], # [2/7, 1/7, 1/14, 1/14]
|
| 10 |
+
decoder_channels = [128, 256, 512, 1024, 1024], # [4/7, 2/7, 1/7, 1/14, 1/14]
|
| 11 |
+
up_scale = 7,
|
| 12 |
+
hidden_channels=[128, 128, 128, 128], # [x_4, x_8, x_16, x_32] [192, 384, 768, 1536]
|
| 13 |
+
n_gru_layers=3,
|
| 14 |
+
n_downsample=2,
|
| 15 |
+
iters=12,
|
| 16 |
+
slow_fast_gru=True,
|
| 17 |
+
corr_radius=4,
|
| 18 |
+
corr_levels=4,
|
| 19 |
+
prefix='decode_heads.'),
|
| 20 |
+
)
|
mono/configs/_base_/models/encoder_decoder/dino_vit_large_reg.dpt_raft.py
ADDED
|
@@ -0,0 +1,19 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# model settings
|
| 2 |
+
_base_ = ['../backbones/dino_vit_large_reg.py']
|
| 3 |
+
model = dict(
|
| 4 |
+
type='DensePredModel',
|
| 5 |
+
decode_head=dict(
|
| 6 |
+
type='RAFTDepthDPT',
|
| 7 |
+
in_channels=[1024, 1024, 1024, 1024],
|
| 8 |
+
use_cls_token=True,
|
| 9 |
+
feature_channels = [256, 512, 1024, 1024], # [2/7, 1/7, 1/14, 1/14]
|
| 10 |
+
decoder_channels = [128, 256, 512, 1024, 1024], # [4/7, 2/7, 1/7, 1/14, 1/14]
|
| 11 |
+
up_scale = 7,
|
| 12 |
+
hidden_channels=[128, 128, 128, 128], # [x_4, x_8, x_16, x_32] [192, 384, 768, 1536]
|
| 13 |
+
n_gru_layers=3,
|
| 14 |
+
n_downsample=2,
|
| 15 |
+
iters=3,
|
| 16 |
+
slow_fast_gru=True,
|
| 17 |
+
num_register_tokens=4,
|
| 18 |
+
prefix='decode_heads.'),
|
| 19 |
+
)
|
mono/configs/_base_/models/encoder_decoder/dino_vit_small_reg.dpt_raft.py
ADDED
|
@@ -0,0 +1,19 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# model settings
|
| 2 |
+
_base_ = ['../backbones/dino_vit_small_reg.py']
|
| 3 |
+
model = dict(
|
| 4 |
+
type='DensePredModel',
|
| 5 |
+
decode_head=dict(
|
| 6 |
+
type='RAFTDepthDPT',
|
| 7 |
+
in_channels=[384, 384, 384, 384],
|
| 8 |
+
use_cls_token=True,
|
| 9 |
+
feature_channels = [96, 192, 384, 768], # [2/7, 1/7, 1/14, 1/14]
|
| 10 |
+
decoder_channels = [48, 96, 192, 384, 384], # [-, 1/4, 1/7, 1/14, 1/14]
|
| 11 |
+
up_scale = 7,
|
| 12 |
+
hidden_channels=[48, 48, 48, 48], # [x_4, x_8, x_16, x_32] [1/4, 1/7, 1/14, -]
|
| 13 |
+
n_gru_layers=3,
|
| 14 |
+
n_downsample=2,
|
| 15 |
+
iters=3,
|
| 16 |
+
slow_fast_gru=True,
|
| 17 |
+
num_register_tokens=4,
|
| 18 |
+
prefix='decode_heads.'),
|
| 19 |
+
)
|
mono/model/__init__.py
ADDED
|
@@ -0,0 +1,5 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
from .monodepth_model import DepthModel
|
| 2 |
+
# from .__base_model__ import BaseDepthModel
|
| 3 |
+
|
| 4 |
+
|
| 5 |
+
__all__ = ['DepthModel', 'BaseDepthModel']
|