

metadata
license: apache-2.0
tags:
- vision
- depth-estimation
widget:
- src: >-
https://huggingface.co/datasets/mishig/sample_images/resolve/main/tiger.jpg
example_title: Tiger
- src: >-
https://huggingface.co/datasets/mishig/sample_images/resolve/main/teapot.jpg
example_title: Teapot
- src: >-
https://huggingface.co/datasets/mishig/sample_images/resolve/main/palace.jpg
example_title: Palace
GLPN fine-tuned on KITTI
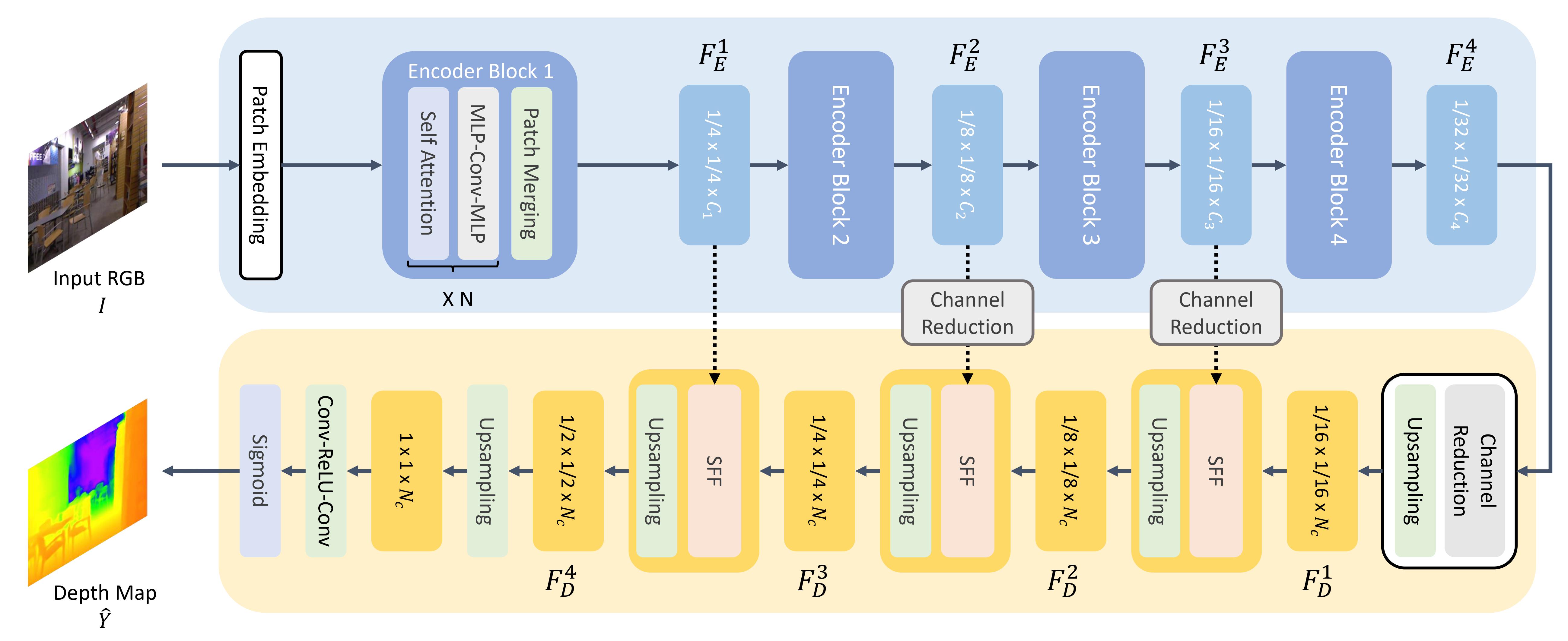
Global-Local Path Networks (GLPN) model trained on KITTI for monocular depth estimation. It was introduced in the paper Global-Local Path Networks for Monocular Depth Estimation with Vertical CutDepth by Kim et al. and first released in this repository.
Disclaimer: The team releasing GLPN did not write a model card for this model so this model card has been written by the Hugging Face team.
Model description
GLPN uses SegFormer as backbone and adds a lightweight head on top for depth estimation.
Intended uses & limitations
You can use the raw model for monocular depth estimation. See the model hub to look for fine-tuned versions on a task that interests you.
How to use
Here is how to use this model:
from transformers import GLPNFeatureExtractor, GLPNForDepthEstimation
import torch
import numpy as np
from PIL import Image
import requests
url = "http://images.cocodataset.org/val2017/000000039769.jpg"
image = Image.open(requests.get(url, stream=True).raw)
feature_extractor = GLPNFeatureExtractor.from_pretrained("vinvino02/glpn-kitti")
model = GLPNForDepthEstimation.from_pretrained("vinvino02/glpn-kitti")
# prepare image for the model
inputs = feature_extractor(images=image, return_tensors="pt")
with torch.no_grad():
outputs = model(**inputs)
predicted_depth = outputs.predicted_depth
# interpolate to original size
prediction = torch.nn.functional.interpolate(
predicted_depth.unsqueeze(1),
size=image.size[::-1],
mode="bicubic",
align_corners=False,
)
# visualize the prediction
output = prediction.squeeze().cpu().numpy()
formatted = (output * 255 / np.max(output)).astype("uint8")
depth = Image.fromarray(formatted)
For more code examples, we refer to the documentation.
BibTeX entry and citation info
@article{DBLP:journals/corr/abs-2201-07436,
author = {Doyeon Kim and
Woonghyun Ga and
Pyunghwan Ahn and
Donggyu Joo and
Sehwan Chun and
Junmo Kim},
title = {Global-Local Path Networks for Monocular Depth Estimation with Vertical
CutDepth},
journal = {CoRR},
volume = {abs/2201.07436},
year = {2022},
url = {https://arxiv.org/abs/2201.07436},
eprinttype = {arXiv},
eprint = {2201.07436},
timestamp = {Fri, 21 Jan 2022 13:57:15 +0100},
biburl = {https://dblp.org/rec/journals/corr/abs-2201-07436.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}```