

LightGlue ⚡️
Local Feature Matching at Light Speed
Philipp Lindenberger · Paul-Edouard Sarlin · Marc Pollefeys
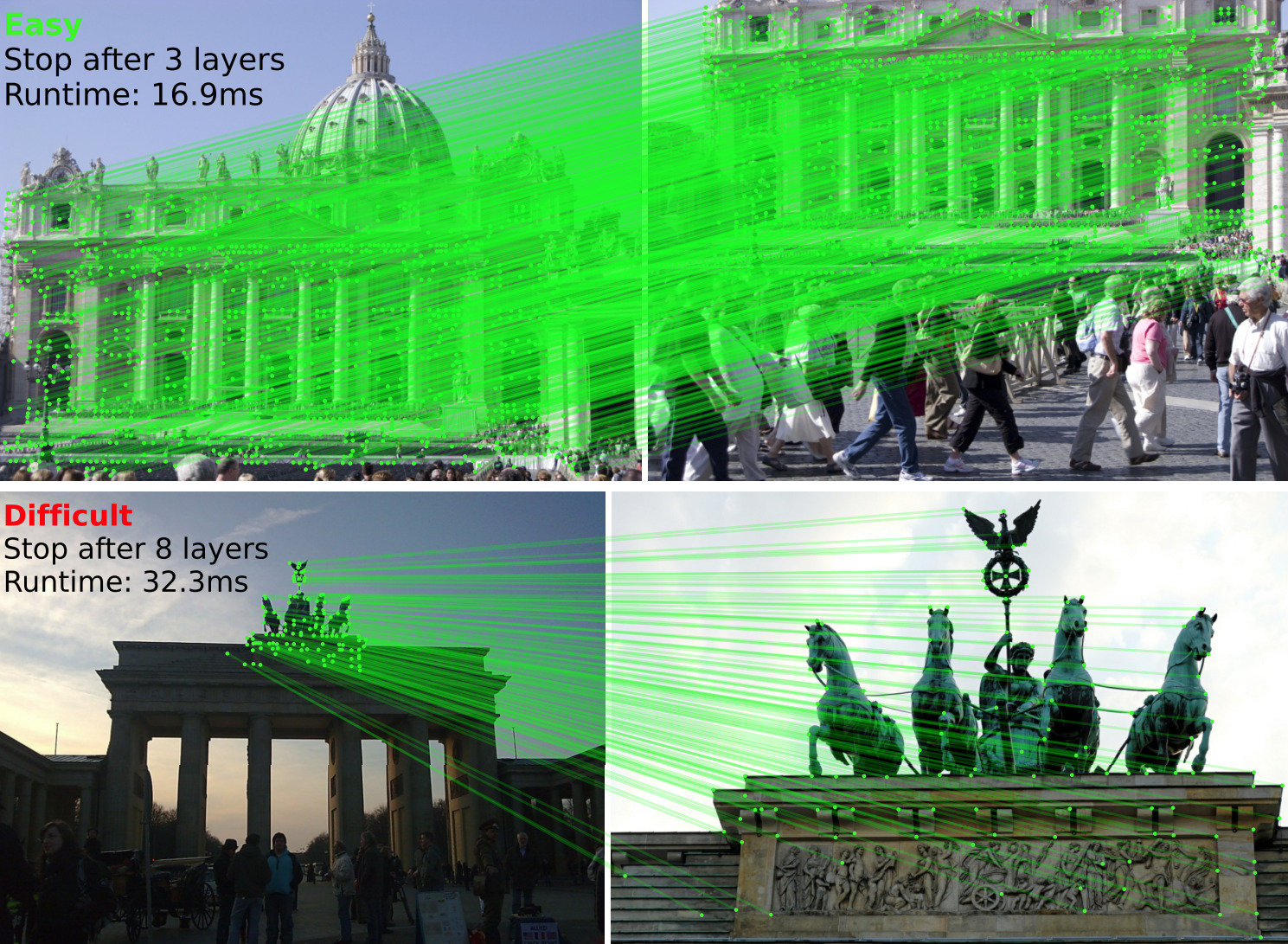
LightGlue is a deep neural network that matches sparse local features across image pairs.
An adaptive mechanism makes it fast for easy pairs (top) and reduces the computational complexity for difficult ones (bottom).
This repository hosts the inference code of LightGlue, a lightweight feature matcher with high accuracy and blazing fast inference. It takes as input a set of keypoints and descriptors for each image and returns the indices of corresponding points. The architecture is based on adaptive pruning techniques, in both network width and depth - check out the paper for more details.
We release pretrained weights of LightGlue with SuperPoint and DISK local features. The training end evaluation code will be released in July in a separate repo. To be notified, subscribe to issue #6.
Installation and demo 
Install this repo using pip:
git clone https://github.com/cvg/LightGlue.git && cd LightGlue
python -m pip install -e .
We provide a demo notebook which shows how to perform feature extraction and matching on an image pair.
Here is a minimal script to match two images:
from lightglue import LightGlue, SuperPoint, DISK
from lightglue.utils import load_image, rbd
# SuperPoint+LightGlue
extractor = SuperPoint(max_num_keypoints=2048).eval().cuda() # load the extractor
matcher = LightGlue(features='superpoint').eval().cuda() # load the matcher
# or DISK+LightGlue
extractor = DISK(max_num_keypoints=2048).eval().cuda() # load the extractor
matcher = LightGlue(features='disk').eval().cuda() # load the matcher
# load each image as a torch.Tensor on GPU with shape (3,H,W), normalized in [0,1]
image0 = load_image('path/to/image_0.jpg').cuda()
image1 = load_image('path/to/image_1.jpg').cuda()
# extract local features
feats0 = extractor.extract(image0) # auto-resize the image, disable with resize=None
feats1 = extractor.extract(image1)
# match the features
matches01 = matcher({'image0': feats0, 'image1': feats1})
feats0, feats1, matches01 = [rbd(x) for x in [feats0, feats1, matches01]] # remove batch dimension
matches = matches01['matches'] # indices with shape (K,2)
points0 = feats0['keypoints'][matches[..., 0]] # coordinates in image #0, shape (K,2)
points1 = feats1['keypoints'][matches[..., 1]] # coordinates in image #1, shape (K,2)
We also provide a convenience method to match a pair of images:
from lightglue import match_pair
feats0, feats1, matches01 = match_pair(extractor, matcher, image0, image1)

LightGlue can adjust its depth (number of layers) and width (number of keypoints) per image pair, with a marginal impact on accuracy.
Advanced configuration
The default values give a good trade-off between speed and accuracy. To maximize the accuracy, use all keypoints and disable the adaptive mechanisms:
extractor = SuperPoint(max_num_keypoints=None)
matcher = LightGlue(features='superpoint', depth_confidence=-1, width_confidence=-1)
To increase the speed with a small drop of accuracy, decrease the number of keypoints and lower the adaptive thresholds:
extractor = SuperPoint(max_num_keypoints=1024)
matcher = LightGlue(features='superpoint', depth_confidence=0.9, width_confidence=0.95)
The maximum speed is obtained with FlashAttention, which is automatically used when torch >= 2.0 or if it is installed from source.
[Detail of all parameters - click to expand]
n_layers: Number of stacked self+cross attention layers. Reduce this value for faster inference at the cost of accuracy (continuous red line in the plot above). Default: 9 (all layers).flash: Enable FlashAttention. Significantly increases the speed and reduces the memory consumption without any impact on accuracy. Default: True (LightGlue automatically detects if FlashAttention is available).mp: Enable mixed precision inference. Default: False (off)depth_confidence: Controls the early stopping. A lower values stops more often at earlier layers. Default: 0.95, disable with -1.width_confidence: Controls the iterative point pruning. A lower value prunes more points earlier. Default: 0.99, disable with -1.filter_threshold: Match confidence. Increase this value to obtain less, but stronger matches. Default: 0.1
Other links
- hloc - the visual localization toolbox: run LightGlue for Structure-from-Motion and visual localization.
- LightGlue-ONNX: export LightGlue to the Open Neural Network Exchange format.
- Image Matching WebUI: a web GUI to easily compare different matchers, including LightGlue.
- kornia now exposes LightGlue via the interfaces
LightGlueandLightGlueMatcher.
BibTeX Citation
If you use any ideas from the paper or code from this repo, please consider citing:
@inproceedings{lindenberger23lightglue,
author = {Philipp Lindenberger and
Paul-Edouard Sarlin and
Marc Pollefeys},
title = {{LightGlue: Local Feature Matching at Light Speed}},
booktitle = {ICCV},
year = {2023}
}